KIRA B 50

59800570 (10/22)
59800570 (10/22)
 장치를 처음 사용하기 전에 본 사용 설명서 원본을 읽고 그에 따라 행동하십시오.
장치를 처음 사용하기 전에 본 사용 설명서 원본을 읽고 그에 따라 행동하십시오.
나중에 또 보거나 다음 소유자가 참고할 수 있도록 사용 설명서를 잘 보관해 두시기 바랍니다.
장비 최초 시운전 전에 장비 디스플레이에서 불러오거나 스마트폰으로 다운로드할 수 있는 전체 사용 설명서를 읽으십시오.
본 장비에는 오픈 소스 라이선스 및/또는 제삼자가 개발한 구성 요소가 포함되어 있을 수 있습니다. 장비에 포함된 오픈 소스 소프트웨어 구성 요소 목록(저작권 보유자 및 라이선스 조건 포함)을 장치의 터치 스크린에 표시할 수 있습니다. 표시하려면 메인 메뉴를 열고 설정으로 이동하여 시스템 정보를 엽니다.
본 설명서는 운영자 및 감독자 사용자 그룹을 대상으로 합니다.
모든 사용자는 장비의 터치 스크린을 사용하여 다양한 장비 기능에 대한 권한을 승인하거나 거부할 수 있습니다.
본 설명서의 모든 설명은 각 사용자 그룹에 대해 장비에서 제안하는 기본 설정과 관련 있습니다.
본 장비는 예를 들어 호텔, 학교, 병원, 공장, 상점, 사무실 및 렌탈 비즈니스 등의 상업적 용도나 산업 현장에 적합합니다. 장비는 반드시 본 사용설명서의 지침에 따라 사용하십시오.
본 장비는 습기 및 연마에 민감하지 않은 매끄러운 바닥을 청소하는 용도로만 사용해야 합니다.
본 장비는 실내 전용입니다.
이 장치는 오직 건조한 구역에 사용하기에 적합합니다.
사용 온도 범위는 +5 °C와 +40 °C 사이입니다.
본 장비는 결빙된 바닥의 청소에 적합하지 않습니다(예를 들어 냉동창고).
본 장비는 1 cm의 최대 수위에 적합합니다. 이 수위가 초과하는 위험이 존재하는 구역으로 이동하지 마십시오.
충전기 또는 배터리를 사용하는 경우에는 본 사용설명서에 따라 허용된 컴포넌트만 사용해야 합니다. 충전기 공급업체 및/또는 배터리 공급업체가 서로 다른 경우 각 업체에서 확인해야 합니다.
본 장비는 공공 교통 도로의 청소에 적합하지 않습니다.
압력에 민감한 바닥에서는 본 장비를 사용하면 안됩니다. 바닥의 허용 면적당 하중을 고려하십시오. 장비에 의해 발생하는 면적당 하중은 기술 자료에 명시되어 있습니다.
본 장비는 폭발 위험이 있는 구역에서 사용하기에 적합하지 않습니다.
본 장비는 명시된 최대 경사를 초과하지 않는 바닥에서 사용해야 합니다(“기술 자료” 챕터 참조).
장비를 처음 사용하기 전에 본 사용 설명서 및 전체 사용 설명서(장비의 디스플레이에서)를 잘 읽고 그 내용을 준수하시기 바랍니다.
모든 후드 및 뚜껑이 닫힌 경우에만 장비를 작동하십시오.
비상 시 즉시 종료하려면 비상 정지 버튼을 누르십시오.
최대 허용 경사를 초과하지 않는 표면에서만 장비를 작동하십시오("기술 자료" 섹션 참조).
도킹 프로세스 중에 도킹 스테이션과 장비 사이에 신체 일부를 두지 마십시오.
심각한 신체상해 또는 사망에 이르게 하는 급박한 위험을 알리는 표시.
심각한 신체상해 또는 사망에 이르게 하는 잠재적인 위험을 알리는 표시.
경미한 상해를 발생시킬 수 있는 위험한 상황을 알리는 표시.
대물피해를 발생시킬 수 있는 위험한 상황을 알리는 표시.
장비 작업 시 적합한 장갑을 사용하십시오.
질식 위험. 포장 호일은 어린이들이 접근할 수 없게 하십시오.
본 장비는 규정에 적합하게만 사용하십시오. 지역 상황을 고려하고 본 장비로 작업하는 경우 제삼자, 특히 어린이에 유의하십시오.
본 제품은 신체적, 감각적 또는 정신적 장애가 있거나 경험 또는/및 지식이 부족한 직원은 사용하면 안 됩니다.
본 장비 취급에 대한 교육을 받았거나 또는 조작에 대한 능력을 입증하여 본 장비 사용에 대해 명백하게 위임을 받은 직원만 본 장비를 사용할 수 있습니다.
어린이는 본 장비를 작동해서는 안 됩니다.
어린이들이 제품을 가지고 장난을 치지 않도록 감독해 주십시오.
어린이와 적절한 권한을 보유하지 않은 사람이 장비에 접근하지 못하도록 하십시오.
안전 장치는 사용자를 보호하는 데 사용됩니다. 안전 장치를 변경하거나 제거하지 마십시오.
탱크 뚜껑으로 인한 부상 위험!
탱크 뚜껑이 의도치 않게 닫히는 경우 사지의 압착 위험이 있습니다.
의도치 않게 닫히지 않도록 탱크 뚜껑을 끝까지 여십시오.
탱크와 탱크 뚜껑 이에 사지가 존재하지 않는 경우에만 탱크 뚜껑을 닫으십시오.
명판에 기재된 전압과 전원의 전압은 일치해야만 합니다.
젖은 손으로 전원 플러그 및 소켓을 잡지 마십시오.
보호 등급 I 장비를 정상적으로 접지된 전원에 연결하십시오.
장비는 IEC 60364-1에 따라 전기 전문가가 연결한 전기 연결에만 연결하십시오.
누출이 있는 경우 장비를 즉시 끄십시오.
거품이 발생하거나 액체가 누출된 경우 즉시 장비를 끄고 도킹 스테이션이나 충전기의 플러그를 뽑으십시오.
매 장비 사용 시 전원 플러그와 전원 연결 케이블이 손상되지 않았는지 확인하십시오. 전원 연결 케이블이 손상되었다면 즉시 제조사, 공인된 고객 서비스 또는 전기 전문 기술자를 통해 교체해서 일어날 수 있는 위험 상황을 방지해야 합니다.
밟거나, 압착하거나, 무리하게 당기거나, 이와 비슷한 행동을 통해 전기 연결 라인 또는 연장 라인을 상하게 하거나 손상시키지 마십시오. 전기 연결 라인이 고온, 오일 및 날카로운 모서리에 노출되지 않도록 하십시오.
제조 업체가 지정한 전기 연결 라인만 사용하십시오. 이는 라인 교체 시에도 적용됩니다. 주문 번호 및 종류는 사용 설명서를 참조하십시오.
동일한 분사수보호기능 및 기계적 내구성을 가진 전기 연결 라인 또는 전기 연장 라인 커플링으로만 교체하십시오.
장비를 작동하기 전에 "장비 점검" 장의 설명에 따라 장비를 점검하십시오.
"자율 작동을 위한 규칙" 장에 설명된 자율 작동을 위한 규칙을 준수하십시오.
위험 지역(예: 주유소)에서 장비 사용 시 해당 안전 규정을 준수하십시오.
폭발 위험이 있는 영역에서의 작동은 금지됩니다.
폭발성 액체, 인화성 가스, 폭발성 분진 또는 희석되지 않은 산 및 용제를 분사하거나 흡입하지 마십시오. 여기에는 흡입 공기의 난류를 통해 폭발성 증기 또는 혼합물을 형성할 수 있는 가솔린, 페인트 희석제 또는 난방유를 비롯하여 장비에서 사용된 재료를 부식시킬 수 있는 아세톤, 희석되지 않은 산 및 용제가 포함됩니다.
가연성 또는 연기가 나는 물체를 절대로 흡입하지 마십시오.
장비로 사람이나 동물을 흡입하지 마십시오.
미끄러운 바닥에서 장비를 사용하지 마십시오.
경사진 표면에서는 측면 및 이동 방향의 경사각을 위한 작동 지침의 지정된 값을 초과하지 마십시오.
회전하는 부품에 걸리지 않도록 몸에 밀착되는 의복을 착용해야 합니다(넥타이, 길고 폭이 넓은 치마 등은 금지).
작동 전 장비 및 액세서리, 특히 전원 연결 케이블 및 연장 케이블의 정상적 상태 및 운전 안전성을 점검하십시오. 손상이 발생한 경우 전원 플러그를 뽑고 장비를 사용하지 마십시오.
장비를 관리감독 없이 작동하지 마십시오.
장비와 함께 승객을 운송하지 마십시오.
모터 작동 시에는 후드를 개방하지 마십시오.
이 장비는 건강에 해로운 먼지를 흡입하는데 적합하지 않습니다.
온도가 0°C 이하일 경우에는 장비를 작동하지 마십시오.
본 장비는 진공 청소기가 아닙니다. 분무한 양보다 더 많은 액체를 흡입하지 마십시오. 본 장비를 건조한 오물을 흡입하는 용도로 사용하지 마십시오.
본 장비는 사용 설명서에 지정된 매트에서의 사용에만 적합합니다.
이 장치는 습기 있는 바닥이나 최대 1cm 수위의 물기 있는 바닥에 적합합니다. 수위가 1cm를 초과하는 영역으로 운행하지 마십시오.
오염된 물과 염기성 물질을 폐기하는 경우 법규를 준수하도록 유의십시오.
외부에 본 장비를 보관하지 마십시오.
세척제는 어린이의 손이 닿지 않는 곳에 보관해야 합니다.
권장 세척제를 희석하지 않은 상태로는 사용하지 마십시오. 해당 제품에는 산, 알칼리 또는 환경에 유해한 성분이 포함되어 있지 않기 때문에 장비 작동에 안전합니다. 세척제가 눈에 들어간 경우 즉시 물로 철저하게 씻어낸 후 세척제를 삼켰을 때와 마찬가지로 즉시 의사에게 진료를 받으십시오.
제조업체에서 권장하는 세척제만 사용하고, 세척제 제조업체의 사용 설명서, 폐기 및 경고 지침을 준수하십시오.
본 장비에는 리튬 이온 배터리가 내장되어 있습니다. 리튬 이온 배터리는에는 특별한 기준이 적용됩니다. 결함이 발생한 배터리의 제거, 설치 및 테스트는 Kärcher 고객 서비스 또는 전문 기술 인력만이 할 수 있습니다.
Kärcher 고객 서비스에서 보관 및 운송에 대한 유의사항을 확인할 수 있습니다.
기기의 개조 및 변경은 허용되지 않습니다.
배터리를 열면 안 됩니다. 합선 위험이 있습니다. 또한 자극적인 증기나 부식성 액체가 새어 나올 수 있습니다.
강한 햇빛, 열 및 불에 전지를 노출하지 마세요. 폭발 위험이 있습니다.
폭발 위험 환경에서는 충전기를 사용하지 마십시오.
충전기를 물기가 있거나 오염된 상태로 사용하지 마십시오.
충전 시 환기를 충분히 시키십시오.
폭발 위험. 배터리 근처 또는 배터리 충전실 안에서는 화염을 사용하거나 불꽃을 일으키거나 흡연해서는 안 됩니다.
폭발 위험. 배터리, 즉 양 극과 셀 커넥터에 공구 등을 올려두지 마십시오.
매번 사용하기 전에 장치와 전원 케이블이 손상되지 않았는지 확인하십시오. 손상된 장치의 사용을 중지하고 자격을 갖춘 전문가가 손상된 부품을 수리하도록 하십시오.
어린이가 배터리 및 충전기에 접근하지 않도록 하십시오.
손상된 배터리를 충전하지 마십시오. Kärcher 고객 서비스 센터에서 손상된 배터리를 교체하십시오.
결함이 있는 배터리를 가정용 쓰레기로 버리지 마십시오. Kärcher 고객 서비스에 알리십시오.
고장난 전지에서 유출된 액체에 접촉하지 마십시오. 실수로 접촉한 경우 액체를 물로 씻어내십시오. 눈에 들어간 경우에 추가로 의사와 상담하십시오.
이 사용 설명서를 반드시 준수하십시오. 배터리 취급에 관한 법률에 따른 권장 사항에 유의하십시오.
공급 전압은 본 기기 명판에 표시된 전압과 일치해야 합니다.
배터리는 이 장비에만 사용하십시오. 다른 용도로 사용하는 것은 금지되어 있으며 위험합니다.
부적절한 브러시는 안전을 위협합니다. 장비와 함께 제공되거나 사용설명서에 지정된 브러시만 사용하십시오.
청소, 유지 보수, 부품 교체 및 기능 전환 작업 전에 장치를 꺼야 합니다. 전원에 연결된 장비의 경우에는 전원 플러그를 뽑으십시오. 배터리 작동 장비의 경우에는 배터리 플러그를 뽑거나 배터리를 분리하십시오.
수리 작업, 부품 설치 및 전기 부품에서의 작업은 공인된 고객 서비스 센터에서만 의뢰하십시오.
승인된 고객 센터 또는 모든 관련 안전 지침을 숙지하고 있는 해당 지역 담당 전문가에게만 수리를 의뢰하십시오.
수위 제한기를 정기적으로 청소하여 손상 징후가 있는지 확인하십시오.
지역별 규정에 따라서 상업적 목적으로 사용되는 이동식 장비의 안전 점검에 유의하십시오.
단락 또는 기타 손상. 호수 또는 고압 물줄기를 사용해서 장비를 세척하지 마십시오.
제조 업체가 승인한 부대 용품 및 예비품만 사용하십시오. 오리지널 부대 용품 및 오리지널 예비품만 안전하고 원활한 장비 사용을 보장합니다.
운송 전에 모터를 끄십시오. 장비의 무게를 고려하여 고정하십시오(사용 설명서의 챕터 기술 데이터편 참조).
존재하지 않거나 또는 변경된 안전 장치
안전 장치는 사용자를 보호하는 데 사용됩니다.
안전 장치를 변경하거나 제거하지 마십시오.
네트워크 연결이 없는 경우 장비의 보안 기능은 영향을 받지 않습니다.
비상 정지 버튼을 누르면 모든 청소 및 주행 기능이 즉시 정지됩니다.
수동 작동 중 두 안전 스위치가 모두 해제되면 장치가 중지됩니다.
자율 작동 중 안전 스위치를 작동하면 10초 동안 작동이 일시 중지됩니다.
간격 센서는 장애물을 감지하고 장비가 장애물을 피해 주행하도록 합니다. 간격 센서는 IEC 60825-1:2014에 따른 레이저 보호 등급 1에 해당합니다.
광학 센서는 장애물을 감지하고 장비가 장애물을 피해 주행하도록 합니다. 광학 센서는 IEC 60825-1:2014에 따른 레이저 보호 등급 1에 해당합니다.
본 도킹 스테이션은 예를 들어 호텔, 학교, 병원, 공장, 상점, 사무실 및 렌탈 비즈니스 등의 상업적 용도나 산업 현장에 적합합니다.
사용자는 도킹 스테이션 사용에 대해 적절한 교육을 받아야 합니다.
건조한 구역에서만 도킹 스테이션을 사용하십시오.
유지보수 작업 전에 전원 콘센트에서 도킹 스테이션의 플러그를 뽑으십시오.
도킹 스테이션 전원 코드가 바닥 청소기의 회전 브러시에 닿지 않도록 하십시오.
실내에서만 도킹 스테이션을 사용하십시오
도킹 스테이션을 오직 실내에만 보관하십시오.
배터리 취급 시 다음 경고 지침에 유의하십시오:
 | 배터리 사용안내서, 본 사용설명서에 명시된 지침 및 배터리 자체에 부착된 지침에 유의하십시오. |
 | 보안경을 착용하십시오. |
 | 산 및 배터리는 어린이의 손이 닿지 않는 장소에 보관하십시오. |
 | 폭발 위험 |
 | 화염, 스파크, 개방된 불꽃 및 흡연은 금지되어 있습니다. |
 | 부식 위험 |
 | 응급 조치. |
 | 경고 지침 |
 | 폐기 |
 | 배터리는 쓰레기통에 버리지 마십시오. |
포장재는 재활용이 가능합니다. 포장재는 친환경적으로 폐기하시기 바랍니다.
전기장치 및 전자장치에는 재활용이 가능한 가치있는 자원이 포함되어 있으며, 잘못 취급하거나 또는 잘못 폐기할 경우 건강 및 환경에 잠재적 위험이 될 수 있는 예를 들어 배터리, 전지 또는 오일과 같은 구성요소가 포함되어 있습니다. 하지만 이런 구성요소는 장치의 원활한 가동에 필수적인 요소입니다. 이 심벌이 표시된 장치는 가정용 쓰레기로 폐기하지 말아야 합니다.
내용물에 대한 최신 정보는 다음을 참조하십시오: www.kaercher.de/REACH
제품의 안전하고 원활한 사용을 위하여 제품 추가적으로 결합이 가능한 용품은 카처 정품만을 사용해 주세요.
액세서리 및 부속품에 대한 정보는 한국카처 웹사이트를 방문해 주세요. www.kaercher.com.
포장을 풀 때 모든 내용물에 있는지 검사하십시오. 부대 용품이 누락되거나 또는 운반 손상이 있는 경우 판매점에 연락하시기 바랍니다.
어느 나라에서나 당사의 공인 마케팅 회사들이 발표한 보증 조건이 적용됩니다. 장비에 고장이 생기면 보증 기간 내에는, 재료나 제조 상의 결함이 그 원인인 한, 무료로 수리해 드립니다. 보증 건이 생긴 경우 구매 영수증을 판매점이나 가장 가까운 공인 고객 서비스 센터에 제시하시기 바랍니다.
상세한 정보는 다음 웹사이트에 설명되어 있습니다: www.kaercher.com/dealersearch
자동 청소에는 위치 코드가 필요합니다. 청소 루트를 시작하려면 장비가 위치 코드 앞에 위치해야 합니다. 따라서 코드를 건물의 전략적인 지점에 배치해야 합니다. 위치 코드는 장비가 읽을 수 있는 코드와 사람이 읽을 수 있는 위치 코드 ID로 구성됩니다.
66 cm 높이에 위치 코드를 설치합니다.

하나의 장비에 동일한 ID를 지닌 여러 개의 위치 코드를 사용할 수 없습니다.
각각의 위치 코드에 원하는 수의 루트를 저장할 수 있습니다.
루트를 시작하려면 해당 위치 코드 앞에 장비를 배치해야 합니다.
위치 코드를 코팅하지 마십시오. 코팅으로 인해 장비가 위치 코드를 올바르게 인식하지 못할 수 있습니다.
루트는 위치 코드 없이도 종료할 수 있습니다.
실용적인 세부 분류를 위해 환경은 영구적으로 동일한 구조를 가진 구역과 환경이 자주 변경되는 구역(예: 계절별 제공으로 인해)으로 구분할 수 있습니다.
추후 설명할 연결 기능을 사용하여 별도로 학습된 청소 구역에서 높은 수준의 유연성을 달성합니다. 리소스 사용 및 가용성과 관련하여 섹션 지속 시간이 약 30~60분임이 입증되었습니다.
또한 이러한 방식으로 자주 사용하는 개별 구역을 더 자주 청소하거나 환경에 큰 변화가 있는 경우 해당 경로만 다시 학습할 수 있습니다.
운송 경로가 길지 않도록 청소하고자 하는 구역 근처에 위치 코드를 배치하시는 것이 좋습니다. 환경의 전략적 위치에 여러 개의 위치 코드를 장착할 수 있습니다.
티치인을 시작하기 전에 루트를 잘 생각하고 청소하고자 하는 구역을 유의미한 섹션으로 구분하십시오.
장비가 손상될 수 있으므로 장비가 들어 올릴 수 없는 파편(예: 테이프, 팔레트 파편 및 접착 필름)을 제거하십시오.
루트에 계절에 따른 설치물 및 기타 일시적인 장애물이 존재하지는 않는지 확인하십시오.
청소하고자 하는 구역을 사용하는 사람이 가장 없을 때 새로운 루트를 학습시킵니다. 정규 업무 및 근무 시간 외의 시간이 좋습니다.
장비에 의해 트리거되는 건물의 보안 시스템은 업무 시간 외에 활성화될 수 있음에 유의하십시오.
온도와 습도가 급격하게 변하는 구역을 오가며 운전하지 마십시오. 습기가 외부, 전자 장치 및/또는 센서에 축적되어 장치의 기능에 영향을 미칠 수 있습니다.
센서에 먼지가 쌓이면 자율 모드에서 장비의 안전하고 효율적인 작업에 영향을 줄 수 있습니다. 센서를 정기적으로 청소하십시오.
티치인 기능을 사용하여 사용자는 기존의 수동 조작 기계처럼 표면을 청소할 수 있습니다. 그 동안 장비는 루트 및 추가 센서 정보를 기록합니다. 티치인 중 사용자는 다양한 매개변수를 설정할 수 있습니다. 이후, 저장된 루트를 자율 작동에 사용할 수 있습니다.
장비의 위치
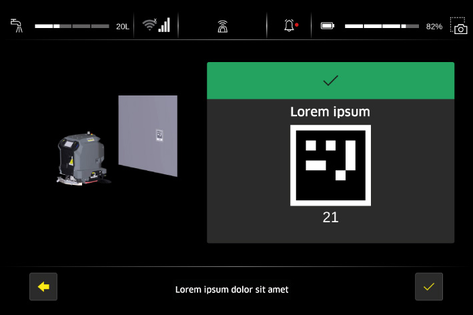
티치인을 시작하려면 장비가 위치 코드 앞에 위치해야 합니다. 장비가 위치 코드를 인식하면 장비 화면에 위치 코드가 표시됩니다. 이후 티치인이 시작됩니다.
티치인 중 기록
다음과 같은 내용이 티치인 중 기록됩니다.
사용자가 학습시킨 루트.
청소 모듈이 켜지거나 꺼진 지점.
물 적용, 세제 투여량, 흡입력 및 브러시 속도에 대한 매개변수 설정.
경음기(예: 교차점에서)
다음과 같은 내용은 티치인 중 기록되지 않습니다
사용자가 짧은 휴식을 취하는 경우, 정지가 기록되지 않음(최대 5분).
장비는 루트 학습 시의 속도를 저장하지 않음.
티치인 중 화면의 기능
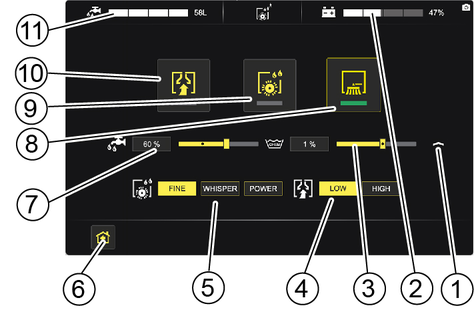
티치인 중 사용자는 청소 장치를 켜고 끄고, 개별 청소 매개변수를 조정하고 스마트 필 기능을 활성화할 수 있습니다.
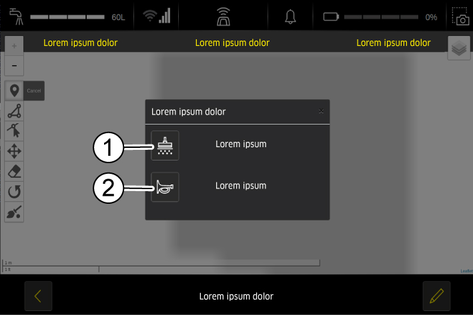
새로운 루트를 기록하려면 자율 메뉴에서 "새로운 루트"를 클릭하십시오. 장비가 위치 코드를 스캔하면 티치인 메뉴가 화면에 표시됩니다.
벽과 장치 우측면 사이의 최적 간격 | 10 cm |
일방향 작동을 위한 최소 통로 너비 | 1.05 m |
유턴을 위한 최소 통로 너비 | 1.7 m |
낙하 가장자리까지의 최소 간격(평행 이동) | 1.5 m |
장치는 바닥 아래 또는15 cm위에 있는 장애물(받침대, 카펫, 포크 암, 케이블, 콘센트, 팔레트)을 감지하지 못합니다. 청소 구역에서 이러한 유형의 장애물을 제외해야 합니다.
장비가 자율 모드에서 학습된 루트를 실행할 수 있기 위해서는 지정된 제한 값을 준수해야 합니다. 사이드 브러시를 사용하여 가장자리 간격을 유지할 수 있습니다.
티치인 중에는 다음 사항에 유의하십시오.
청소하고자 하는 영역 학습
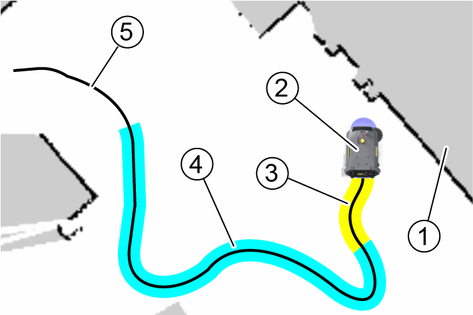
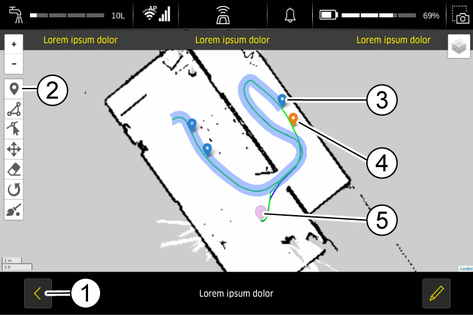
기존의 수동 조작 장비를 사용하는 것과 동일한 방식으로 영역을 청소하십시오. 화면의 라이브 맵을 사용하여 경로를 서로 가까이 배치하거나 약간 겹치게 배치합니다. 이미 청소된 영역은 파란색으로 표시되어 청소해야 하는 영역의 위치를 잊지 않도록 합니다.
사이드 브러시가 청소해야 하는 영역의 가장자리에 오도록 하려면 시계 반대 방향으로 움직여야 합니다.
청소 장치 켜기
청소 장치는 항상 다음과 같은 순서로 켜야 합니다.
흡입
브러시 헤드
사이드 브러시
청소 장치 끄기
청소 장치는 통과 경로에서 또는 루트가 끝나기 전에 항상 다음과 같은 순서로 꺼야 합니다.
사이드 브러시
브러시 헤드
흡입
장비와 흡입 스위치를 켜고 몇 미터를 주행하여 영역에 남아 있는 물을 빨아들입니다.
물이 남아있지 않도록 하기 위해 루트를 종료하기 전에 청소를 충분히 차단해야 합니다.
스마트 필 기능은 넓고 독립된 영역을 위한 것입니다. 이 기능은 일반 티치인 중 활성화할 수 있습니다.
Smart Fill 버튼은 하나 이상의 청소 기능이 활성화된 경우에만 터치 스크린에 나타납니다.
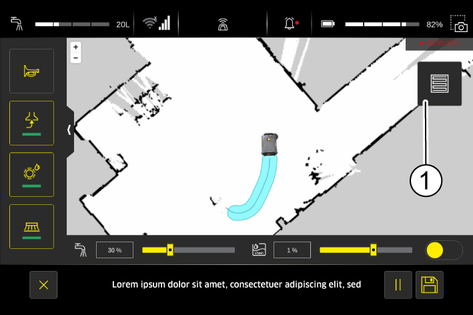
이후, 청소하고자 하는 영역을 단 한 번 경계를 따라 주행하면 됩니다. 그러면 장비가 자율 작동 중 경계를 따라 주행한 영역을 청소합니다. 해당 영역 내에서 주행 경로는 기본적으로 나선형입니다.
스마트 필 기능의 시작점과 끝점은 동일해야 함에 유의하십시오. 이를 위해 화면을 사용하십시오. 여기서 경로의 시작점은 원으로 표시됩니다.
영역을 장애물이 없는 구역으로 나눕니다. 그렇지 않은 경우, 영역을 청소할 수 없게 될 수 있습니다.
루트 중 여러 개의 스마트 필을 설정할 수 있습니다.
카펫이 깔린 바닥을 피하십시오.
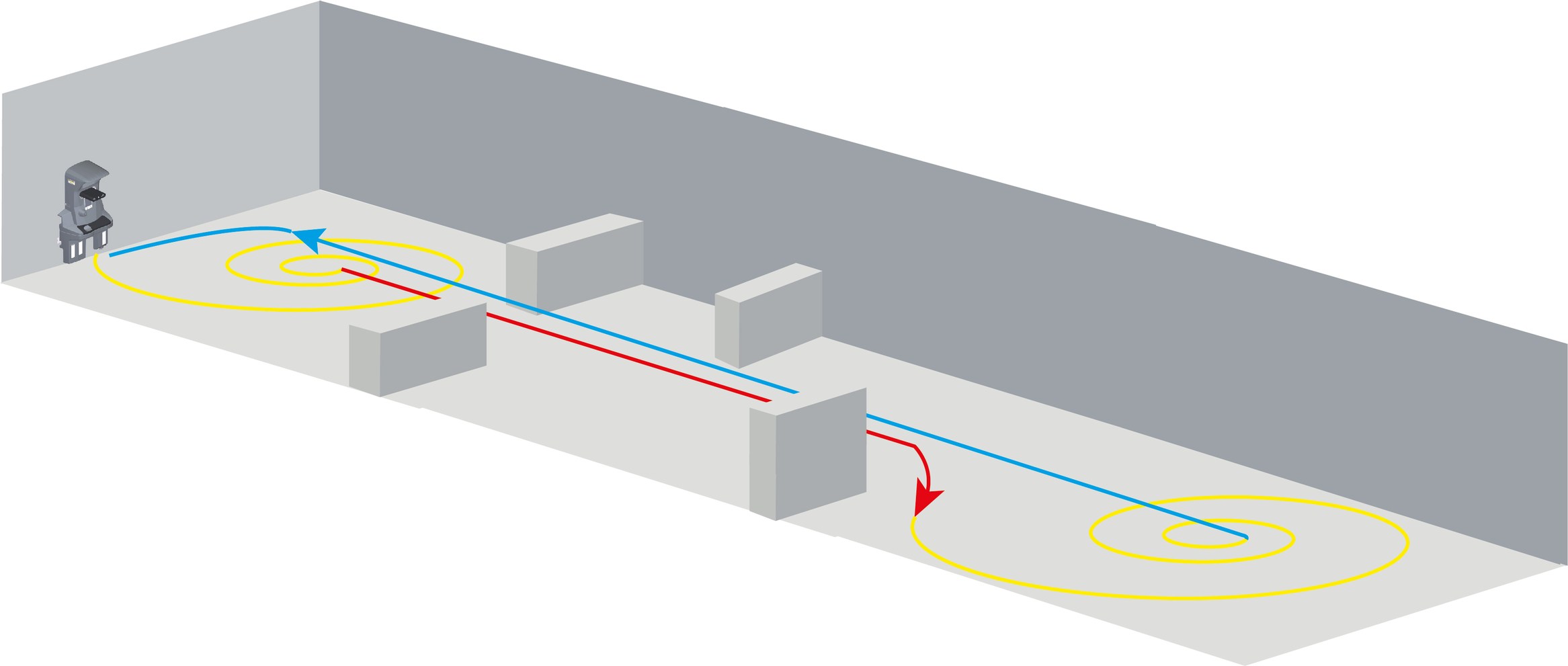
스마트 필로 복잡한 환경에서 청소 루트 생성
스마트 필 기능은 복잡한 영역이 있는 환경에서도 사용할 수 있습니다. 이를 위해 스마트 필 기능은 티치인 루트 중 다양한 빈 영역에서 여러 번 사용할 수 있습니다. 그런 다음, 여러 스마트 필 영역 사이에서 이동 경로(청소 장치 꺼짐) 또는 청소 경로(청소 장치 켜짐)를 학습할 수 있습니다.
루트 종료 시 장비를 도킹하려면 학습 과정 중 루트가 도킹 스테이션 앞에서 끝나야 합니다. 이를 위해 "도킹으로 경로 종료" 버튼을 누르십시오.
자율 모드에서 루트 재생을 실시하기 전에 다음 사항에 유의하십시오.
청소를 실시할 수 있을 만큼 복잡하지 않습니까 아니면 정규 업무 시간 외에 청소를 실시해야 합니까?
청수 탱크가 가득 차 있습니까?
폐수 탱크가 비어 있습니까?
장비의 배터리가 충전되어 있습니까?
청소하고자 하는 영역에서 큰 입자 오염물이 제거되었습니까?
환경이 정돈된 상태입니까?
해당 영역에 새로운 대형 장애물이 없습니까?
장비가 올바른 위치 코드 앞에 있습니까?
루트가 기록된 후에는 "기존 경로" 메뉴에서 사용할 수 있으며, 해당 위치에서 이를 선택할 수 있습니다.
해당 버튼을 활성화하면 장비가 관련된 위치 코드에 따라 기존 경로를 정렬합니다. 빠른 텍스트 검색의 입력 필드를 사용하여 추가로 필터링할 수 있습니다.
메인 메뉴가 열린 상태에서 위치 코드 앞에 장치를 배치할 수도 있습니다. 위치 코드가 감지되면 화면에 "위치 코드에 대한 루트 사용 가능" 알림이 나타납니다. 알림을 클릭하면 관련 경로가 표시됩니다.
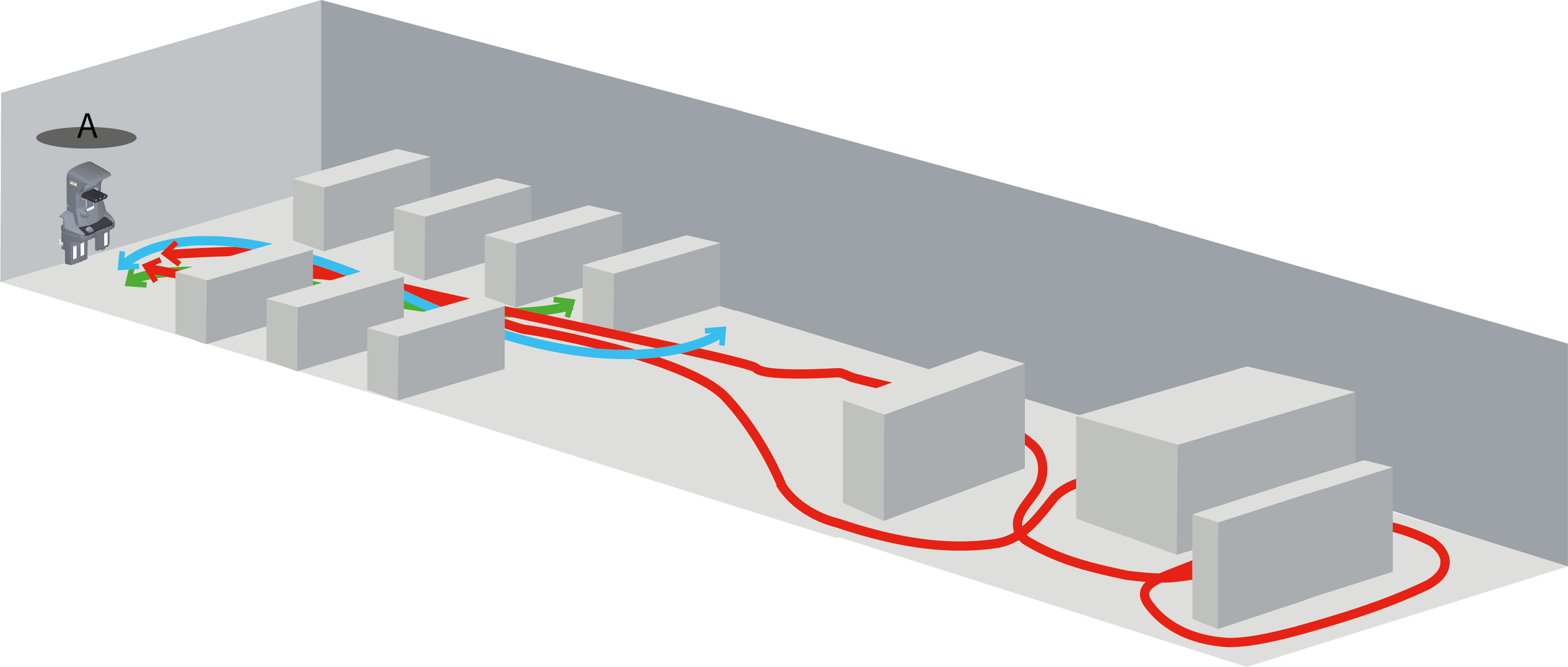
하나의 도킹 스테이션에 시작점과 끝점이 있는 다양한 루트를 서로 연결할 수 있습니다.
예시:
사용자는 넓은 보관 영역을 보유하고 있습니다. 여기에서 사용자는 장비에 대해 도킹 스테이션을 설정했습니다. 보관 장소를 논리적으로 세부 분류한 후, 개별 청소 구역에 대해 다양한 루트를 학습시킬 수 있습니다. 이러한 루트는 보관 장소의 도킹 스테이션에서 시작되고 종료됩니다. 전체 보관 장소 또는 여러 구역을 자율적으로 청소하기 위해, 다양한 루트를 연결할 수 있습니다. 이후, 각각의 루트 후에 도킹 프로세스를 포함하여 다양한 루트가 순서대로 이어집니다. 필요한 경우, 장비의 리소스를 교환합니다.
일일 유지보수에는 다음과 같은 항목이 포함됩니다.
센서 청소.
기계의 전체적 외관 확인.
기계를 켠 후 자율 주행 점검.
또한 작업자는 작동 중 현장을 떠나서는 안 됩니다. 특히 청소 시간이 매우 긴 경우, 청소 진행 상황을 주기적으로 확인하십시오.
다음과 같은 위험 지점에서 충분한 간격을 유지하십시오.
충돌 가능성이 있는 모서리
유리 난간
에스컬레이터
지면 높이의 수조/분수
카펫
임계값 > 5 mm
케이블 및 전선
엘리베이터
롤링 도어
비상구
대형 반사 표면
극도로 많은 분진이 발생하는 지역 및 환경을 피하십시오. 센서에 먼지가 쌓여 자율 모드에서 장비의 안전한 운행에 영향을 줄 수 있습니다.
본 장비는 실내에서만 사용하십시오.
이 예시는 슈퍼마켓에서 가능한 청소 구역을 보여줍니다.
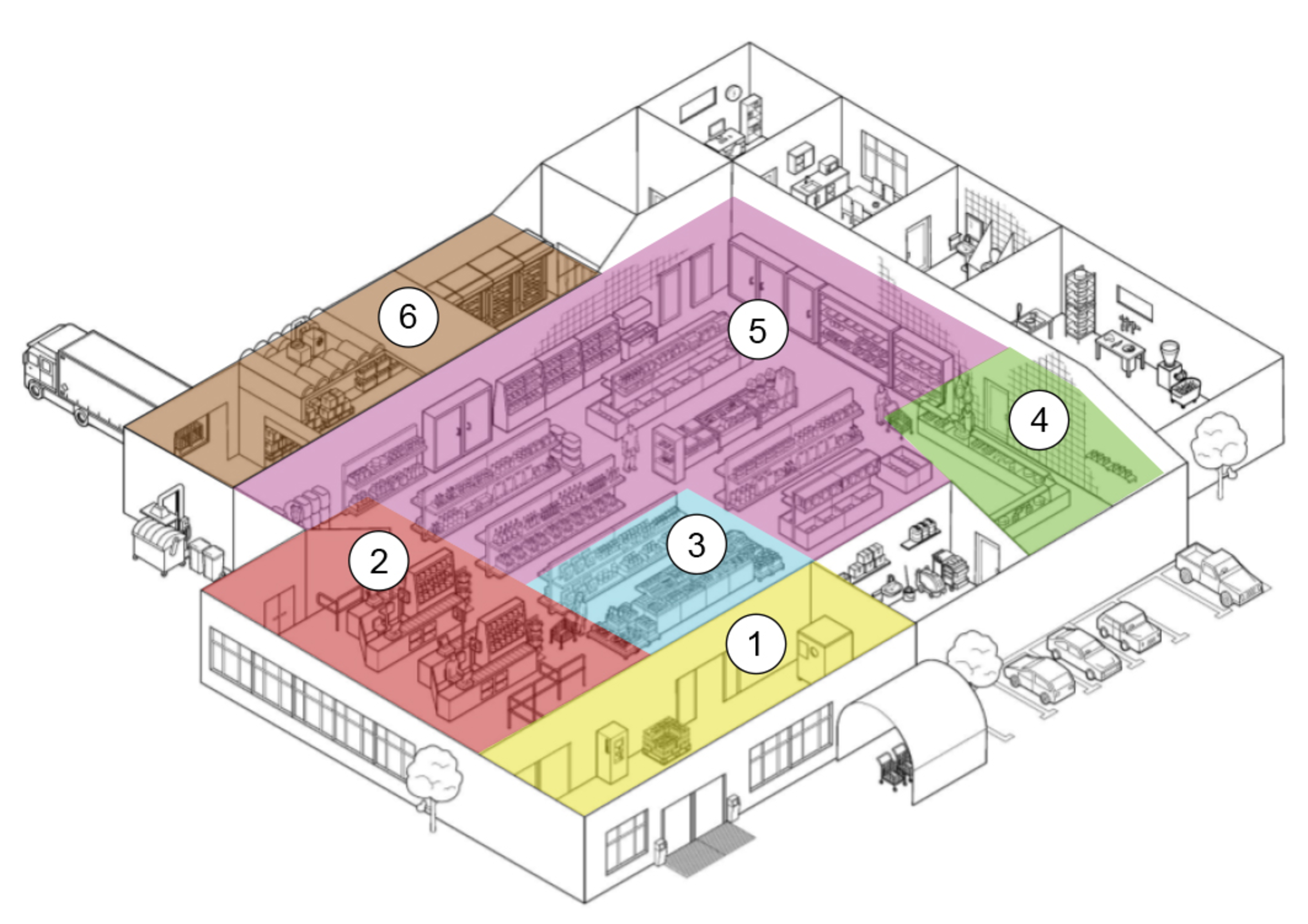
입구 및 출구 구역
이동량이 많기 때문에 입구 및 출구 구역을 더 자주 청소해야 합니다.
날씨가 좋지 않은 경우, 입구 및 출구 구역을 하루에도 여러 번 청소해야 할 수 있습니다.
계산대 구역
많은 사람들이 사용하기 때문에 계산대 구역을 더 자주 청소해야 합니다.
과일 및 채소 구역
과일 및 채소 구역은 더 많은 오염이 발생할 수 있으므로 더 자주 청소해야 합니다. 계절에 따른 설치물 및 장애물이 있는 구역에는 추가적인 분할이 유용할 수 있습니다.
정육 코너
이 구역에는 더 엄격한 위생 기준이 적용되며 청결한 환경이 매우 중요하므로 해당 구역을 더 자주 청소해야 합니다. 계절에 따른 설치물 및 장애물이 있는 구역에는 추가적인 분할이 유용할 수 있습니다.
매대 영역
계절에 따른 전시가 있는 구역에는 별도의 경로를 고려하시는 것이 좋습니다.
보통 수준의 오염 발생은 일반적으로 하루에 한 번 해당 영역을 청소하는 것으로 충분합니다.
보관 장소
상자나 팔레트 등 움직이는 물체로 인해 통로가 막히지 않았는지 확인하십시오.
정상적인 작업 과정을 방해하지 않도록 정규 업무 시간 이후에 보관 장소를 청소하는 것을 고려하십시오.
쉽게 접근할 수 있는 구역에 위치 코드를 배치하고 이것이 차단되지 않았는지 확인하십시오.
특정 구역을 얼마나 많은 사람들이 사용하는지에 유의하여, 많은 사람들이 이동하는 구역에 대해 별도의 루트를 생성하십시오.
계절에 따른 설치물 또는 변경되는 설치물 및 장애물이 있는 구역에 대해 독립적인 루트를 생성하십시오. 하나 또는 여러 개의 도킹 스테이션을 사용하여 이러한 루트를 다른 루트와 다시 연결할 수 있습니다.
정규 업무 시간 외에 티치인을 실시하거나 하위 구역을 차단하십시오.
티치인을 실시하기 전, 청소하고자 하는 영역에서 일시적이거나 움직이는 물체를 제거하십시오.
장비가 전체 내부 영역을 스캔할 수 있도록 스마트 필 영역 내부에 평평한 물체(높이가 15 cm 미만) 또는 영구적인 장애물이 없는지 확인하십시오.
회전해야 하는 통로의 경우, 1.7 m의 최소 통로 너비를 고려하십시오.
섬세한 형태로 튀어나온 물체, 물이 있는 수반, 계단 및 돌출된 선반 등을 피하십시오.
청소하고자 하는 표면에 깨진 유리 조각, 커다란 식물의 일부, 윤활성 액체 등의 대규모 오염물이 존재하지 않도록 하십시오.
에스컬레이터, 엘리베이터 문, 특히 비상구를 통과하거나 그 옆에 청소 경로를 배치하지 마십시오. 이러한 구역은 수동으로 청소하십시오.
일부 쇼핑몰에는 지면과 같은 높이의 수면이나 물에 잠기 구역이 존재합니다. 루트 설정 시, 이러한 구역을 피하고 의도치 않게 장비가 이러한 구역에 들어가지 않도록 하십시오.
장비가 전체 내부 영역을 스캔할 수 있도록 스마트 필 영역 내부에 평평한 물체(높이가 15 cm 미만)가 없는지 확인하십시오.
정규 업무 시간 외에 티치인을 실시하거나 하위 구역을 차단하십시오.
의자와 테이블이 많은 곳(예: 푸드 코트)을 피하고 해당 구역은 수동으로 청소하십시오.
바닥과 가까운 창과 난간 뒤에 선반이 있는 경우 1.5 m 제한 값을 충족시키십시오.
에스컬레이터, 엘리베이터 문, 특히 비상구를 통과하거나 그 옆에 청소 경로가 지나가지 않도록 유의하십시오. 이러한 구역은 수동으로 청소하십시오.
카펫이 깔린 바닥을 피하십시오.
롤링 도어 인근을 청소하지 마십시오.
장비가 전체 내부 영역을 스캔할 수 있도록 스마트 필 영역 내부에 평평한 물체(높이가 15 cm 미만)가 없는지 확인하십시오.
직사광선은 센서와 내비게이션에 문제를 일으킬 수 있습니다.
바닥과 가까운 창과 난간 뒤에 선반이 있는 경우 1.5 m 제한 값을 충족시키십시오.
공간 내에 사람들이 많지 않을 때 티치인을 실시하거나 하위 구역을 차단하십시오.
가능한 경우, 움직이는 물체를 제거하십시오.
장비가 이러한 물체를 안정적으로 감지하지 못할 수 있으므로, 대기열 관리 시스템(예: 차단 장벽)이 있는 구역을 피하십시오.
장비가 측면에서 접근하는 경우, 단독으로 설치된 표지판이 인식되는지 확인하십시오.
의자와 테이블이 많은 곳(예: 푸드 코트)을 피하고 해당 구역은 수동으로 청소하십시오.
에스컬레이터, 엘리베이터 문, 특히 비상구를 통과하거나 그 옆에 청소 경로를 배치하지 마십시오. 이러한 구역은 수동으로 청소하십시오
테이프, 팔레트 파편, 접착 필름을 제거하고 청소 경로에 쓰레기 및 물체(예: 케이블, 포장 테이프 등)가 없는지 확인하십시오. 이것이 브러시에 걸릴 수 있습니다.
자율 작동 중 장비 주변에 평평한 물체(지게차 타인 등과 같이 높이가 15 cm 미만인 물체)가 없어야 합니다.
귀하 설비의 "교통 규칙"에 따라 루트를 배치합니다.
장비가 창고의 중요하고 예측이 어려운 지점에서 인지될 수 있도록 티치인 중에 경음기를 사용하십시오.
응급 운송 수단을 위해 사용되는 지역에서는 장비에 의해 해당 구역이 차단될 수 있으므로 장비를 사용하지 마십시오.
바닥과 가까운 창과 난간 뒤에 선반이 있는 경우 1.5 m 제한 값을 충족시키십시오.
장비가 전체 내부 영역을 스캔할 수 있도록 스마트 필 영역 내부에 평평한 물체(높이가 15 cm 미만)가 없는지 확인하십시오.
이 장비에는 레이저, 3D 및 초음파 센서가 장착되어 있습니다.
장비는 사용자가 학습시킨 루트를 유지합니다. 하지만 새로운 장애물을 감지하고 이를 피하기 위해 루트를 조정할 수도 있습니다.
장비는 벽과 장애물에 최대 10cm까지 접근할 수 있습니다. 사이드 브러시를 사용하여 가장자리까지 구석구석까지 청소할 수 있습니다.
장비가 즉시 멈추고 청소 장치가 꺼집니다. 화면은 계속 작동합니다. 작동을 재개하려면 비상 정지 버튼을 돌려서 당겨야 합니다. 그러면 장비가 현재 루트를 청소하기 시작합니다.
아니요, 맵은 자체적으로 학습할 수 없습니다. 본래 레이아웃에 대해 약간의 변경을 실시하는 것은 문제 되지 않습니다. 레이아웃에서의 변경이 클수록 장비가 더 비효율적으로 작동합니다. 레이아웃이 대폭 변경된 경우, 루트를 다시 학습시켜야 합니다.
예, 센서는 유리를 감지할 수 있으며, 따라서 유리 소재의 슬라이딩 도어 또는 유리 분리벽 등을 인식합니다.
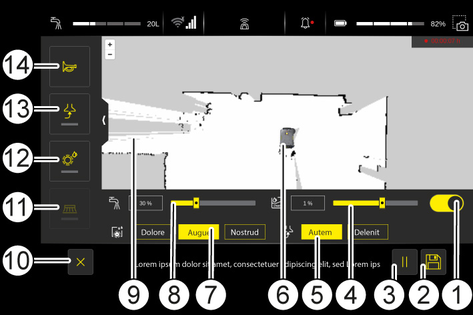
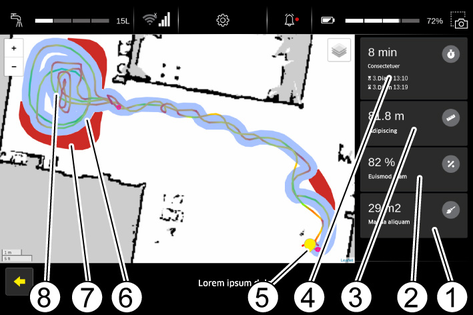
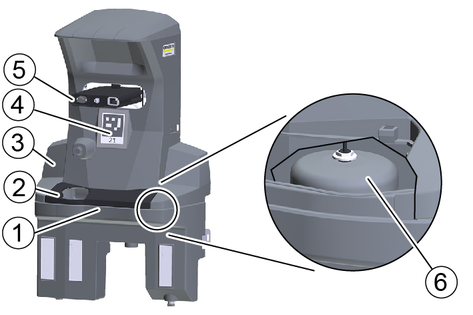
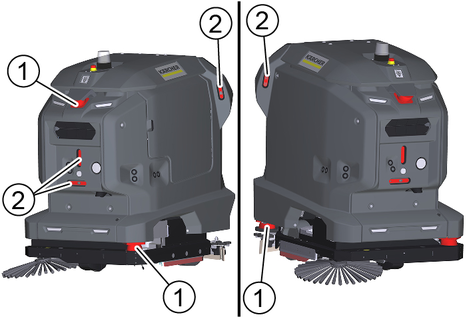
멀티컬러 LED 표시등이 로봇의 상태 및 이동 방향을 나타냅니다.
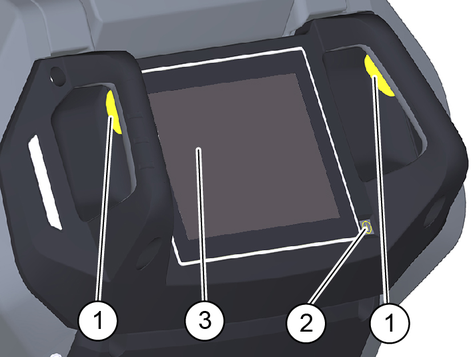
청소 과정을 위한 조작 요소는 황색입니다.
정비 및 서비스를 위한 조작 요소는 밝은 회색입니다.
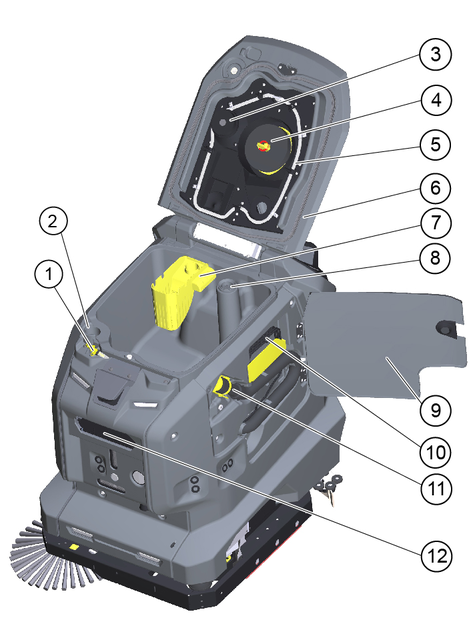
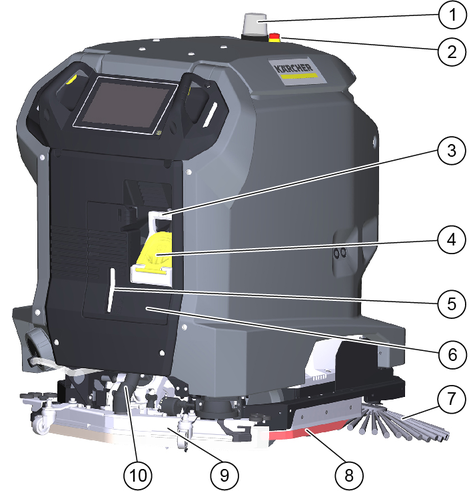
 | 세제 탱크 충전 레벨 100% |
 | 세제 탱크 충전 레벨 50% |
 | 세제 탱크 충전 레벨 25% |
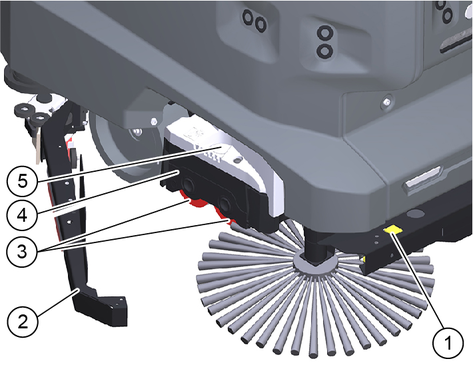
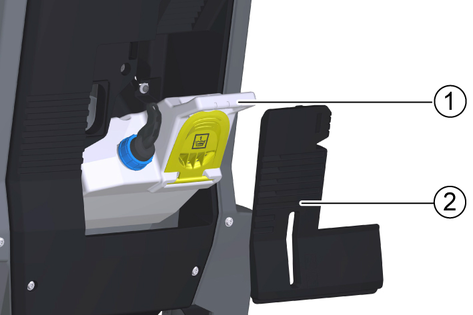
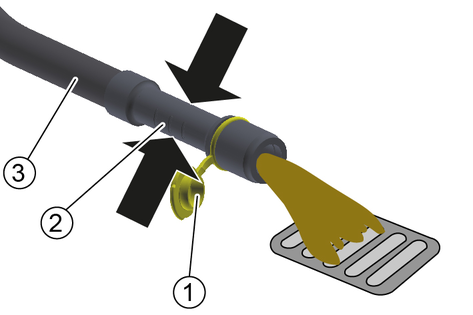
 | 세제 주입구 |
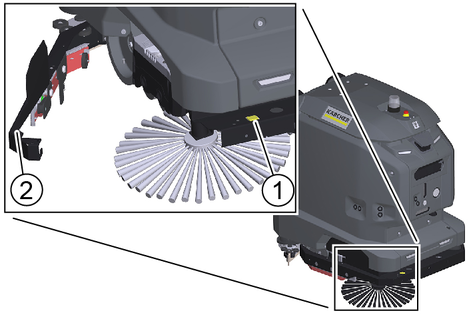
 | 브러시 변경에 대한 잠금 해제 버튼 |
 | 먼저 큰 입자 오염물 탱크를 들어 올린 다음 빼냅니다 |
 | 폐수용 배수 호스 |
 | 물 공급구 |
 | 청수 배출 |
 | 배터리 충전용 전원 플러그 |
 | 운송용 래싱 지점 |
 | 담수 주입구 |
나무 하부 구조에서 상자와 강화 목재를 제거합니다.
고정 벨트를 제거합니다.
두 개의 블록을 풉니다.
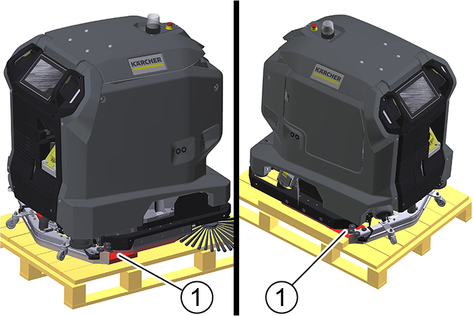
목재 하부 구조에서 보드와 나무 블록의 나사를 풉니다.
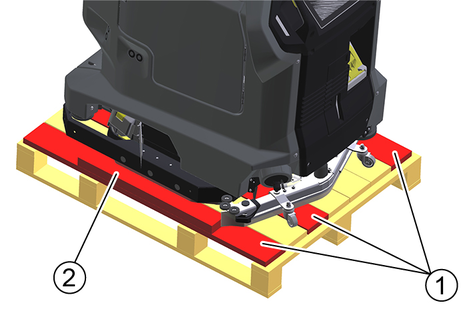
나사로 고정된 보드와 각목이 있는 목재 하부 구조 뒤에 경사로를 배치합니다.
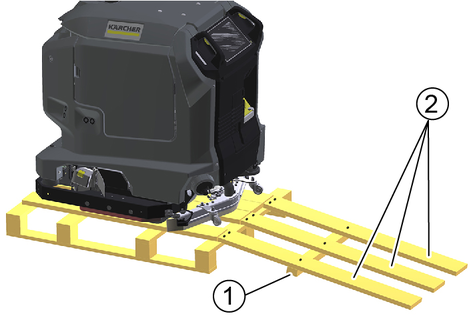
이전에 제거한 나사로 보드와 각목을 고정합니다.
장비를 목재 하부 구조에서 뒤로 당겨 빼냅니다.
도킹 스테이션을 사용하여 작동하면 배터리가 자동으로 충전됩니다.
도킹 스테이션 없이:
장비 수납칸 도어를 엽니다.
충전 케이블을 뽑습니다.
장비에 충전 케이블이 없는 경우 IEC 커넥터가 있는 전원 케이블을 도킹 포트의 전원 소켓에 삽입합니다.
충전 케이블의 전원 플러그를 소켓에 꽂습니다.
충전 과정이 자동으로 실시됩니다.
충전 상태가 터치스크린에 표시됩니다.
충전 과정 중에는 장비를 사용할 수 없습니다.
완전히 방전된 배터리는 약 8시간 동안 충전됩니다.
충전 과정이 종료된 후 전원 플러그를 소켓에서 뽑으십시오.
전원 케이블을 장비 수납칸에 넣거나 도킹 포트에서 전원 케이블을 뽑습니다.
시스템을 더 이상 올바르게 다시 시작할 수 없는 경우 시스템을 전원 공급 장치에서 완전히 분리하고 RESET 버튼을 사용하여 다시 시작할 수 있습니다.
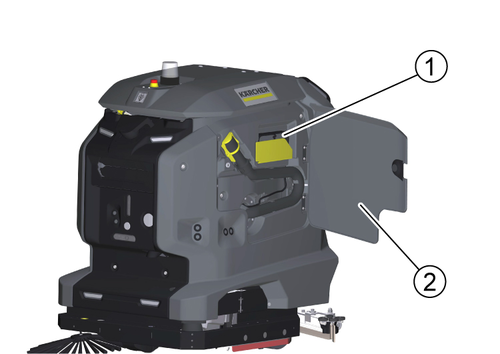
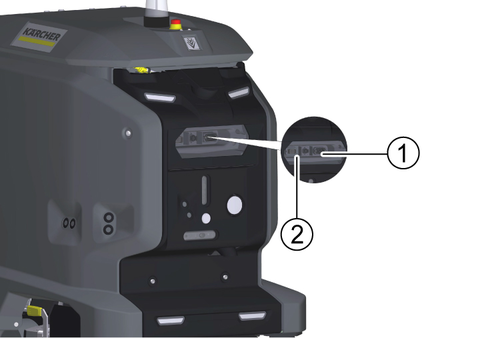
커버를 제거합니다.
세제 탱크를 분리합니다.
RESET 버튼을 약 10초 동안 길게 누릅니다.
이제 시스템이 전원 공급에서 완전히 분리되었습니다.
전원 버튼을 눌러 장비를 시동합니다.
이제 시스템이 시동됩니다.
세제 탱크를 다시 설치하십시오.
커버를 다시 덮습니다.
시운전 후 장치의 사용 설명서가 터치스크린에 표시될 수 있습니다. 사용 설명서를 스마트폰에도 다운로드하여 조작과 동시에 작동 단계를 사용 설명서에서 확인할 수 있습니다.
스마트폰에서 아래 코드를 스캔하고 지침에 따라 사용 설명서를 다운로드하십시오.

도킹 스테이션을 사용하여 작동하면 청수 탱크가 자동으로 채워집니다.
탱크 뚜껑으로 인한 부상 위험!
탱크 뚜껑이 의도치 않게 닫히는 경우 사지의 압착 위험이 있습니다.
의도치 않게 닫히지 않도록 탱크 뚜껑을 끝까지 여십시오.
탱크와 탱크 뚜껑 이에 사지가 존재하지 않는 경우에만 탱크 뚜껑을 닫으십시오.
폐수 탱크 뚜껑을 위로 회전시키십시오.
급수 호스를 장비의 호스 커플링에 연결합니다. 최대 수온 50 °를 준수하십시오!
폐수 탱크의 뚜껑을 닫습니다.
물 공급구를 엽니다.
청수 탱크가 가득 차면 채우기가 자동으로 중지됩니다.
탱크 뚜껑으로 인한 부상 위험!
탱크 뚜껑이 의도치 않게 닫히는 경우 사지의 압착 위험이 있습니다.
의도치 않게 닫히지 않도록 탱크 뚜껑을 끝까지 여십시오.
탱크와 탱크 뚜껑 이에 사지가 존재하지 않는 경우에만 탱크 뚜껑을 닫으십시오.
폐수 탱크 뚜껑을 위로 회전시키십시오.
물 공급구 호스를 공급구에 꽂습니다. 최대 수온 50 °를 준수하십시오!
물 공급구를 엽니다.
충전 레벨을 모니터링하고 탱크가 가득 차면 물 공급을 끕니다.
손상 위험
권장 세제만 사용하십시오. 다른 세제를 사용하면 작동 안전, 사고 위험 및 장치의 서비스 수명 단축과 관련된 위험이 증가합니다. 용매, 염산 및 불화수소산이 포함되지 않은 세제만 사용하십시오. 세제의 안전 지침에 유의하십시오.
강한 거품이 발생하는 세제는 사용하면 안 됩니다.
투입 지침을 준수하십시오.
권장 세제:
사용 | 세제 |
|---|---|
모든 내수성 바닥의 일상 청소 | CA 50 C RM 756 |
관리 부품을 사용한 일상 청소 | RM 746 RM 780 |
산업용 바닥의 일상 청소 및 기본 청소 | RM 69 |
광택 바닥의 일상 청소 | RM 755 |
미세 석재 타일의 일상 청소 및 기본 청소 | RM 753 |
내산성 바닥의 일상 청소 및 기본 청소 | RM 751 |
청소와 소독 | RM 732 |
모든 내알칼리성 바닥재의 기본 청소 | RM 752 |
알칼리에 민감한 바닥의 기본 청소 및 코팅 제거 | RM 754 |
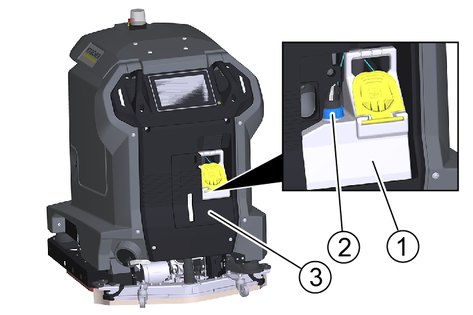
세제 주입구의 뚜껑을 엽니다.
세제를 채웁니다.
주의사항:
세제 탱크를 제거하고 다른 세제 탱크로 교체하여 세제를 빠르게 교체할 수 있습니다.
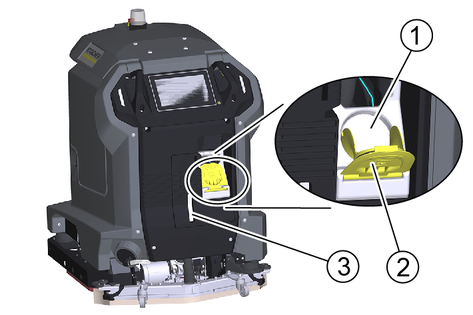
세제 탱크 뚜껑을 제거합니다.
세제 탱크의 잠금장치를 풉니다.
세제 탱크에서 필터가 장착된 세제 흡입호스를 빼냅니다.
장비에서 세제 탱크를 분리합니다.
새로운 세제 탱크를 장비에 장착합니다.
필터가 장착된 세제 흡입 호스를 세제 탱크에 삽입합니다.
잠금장치를 장착합니다.
세제 탱크 뚜껑을 닫습니다.
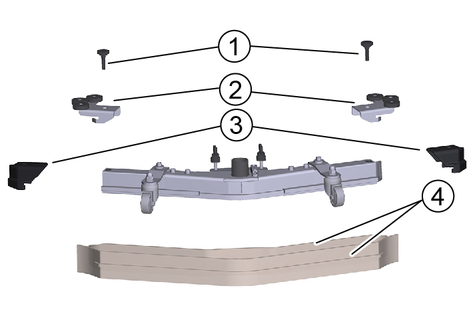
진공바 현가장치에 진공바를 밀어 넣습니다.
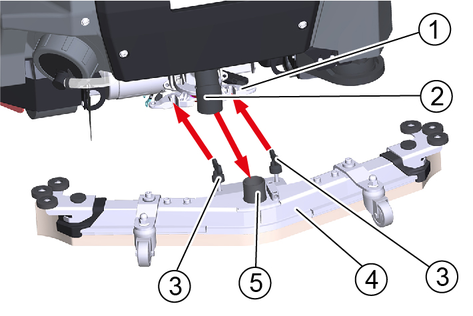
날개 나사를 단단히 조입니다.
흡입호스를 호스 커넥터에 삽입합니다.
진공바의 경사는 공장에서 설정됩니다. 진공바가 평지에 놓였을 때, 수준기의 기포가 두 표시 사이에 있지 않은 경우에만 재조정해야 합니다.
너트를 푸십시오.
진공바를 내렸을 때 수준기의 기포가 두 선 사이에 오도록 회전 손잡이를 설정합니다.
너트를 다시 단단히 조입니다.
높이 조잘장치를 이용해 바닥 접촉 시 석션립의 휘어짐에 영향을 줄 수 있습니다.
기본 설정: 진공바 위에 3개의 와셔, 진공바 아래에 3개의 와셔.
평평하지 않은 바닥: 진공바 위에 5개의 와셔, 진공바 아래에 1개의 와셔.
매우 매끄러운 바닥: 진공바 위에 1개의 와셔, 진공바 아래에 5개의 와셔.
나사를 푸십시오.
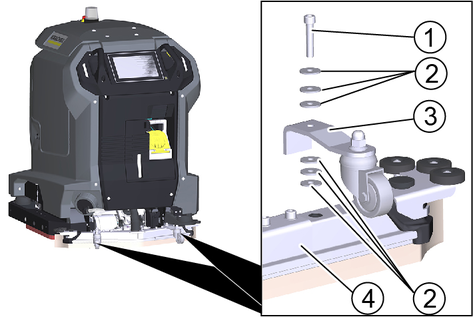
진공바 위의 나사에 원하는 수의 와셔를 끼웁니다.
간격 롤 홀더를 통해 나사를 삽입합니다.
나머지 와셔를 간격 롤 아래에서 나사에 끼웁니다.
진공바에 나사를 끼우고 단단히 조입니다.
두 번째 스페이서 롤러에서 이 과정을 반복하십시오.
양측 스페이서 롤러를 동일한 높이로 조절하십시오.
사고 위험
손상되거나 결함이 있는 장비는 작동 중 사고를 유발할 수 있습니다.
사용하기 전에 장비를 확인하고 손상 및 오작동을 책임자에게 보고하십시오.
손상되었거나 오작동하는 경우 장비를 사용하지 마십시오.
장비에 누출이 있는지 확인하십시오.
비상 정지 버튼의 기능을 점검하십시오.
두 안전 스위치의 기능을 모두 확인합니다(수동 모드에서 두 안전 스위치를 모두 해제하면 장비가 제동됩니까?).
안전 스위치 결함으로 인한 사고 위험
하나 또는 두 개의 안전 스위치가 작동하지 않는 위치로 안정적으로 돌아가지 않으면 장치를 즉시 작동 중단하십시오.
센서의 오염을 점검하고, 필요 시 청소합니다.
장비를 다시 시작하십시오.
센서의 기능을 점검하십시오(장비가 장애물을 감지합니까?).
비상 정지 버튼을 돌려 잠금을 해제합니다.
시작 버튼을 누릅니다.
장비가 위로 시동됩니다.
로그인 화면이 터치스크린에 표시될 때까지 기다리십시오.
감독자: 장비의 전체 기능을 사용할 수 있으며 모든 사용자 권한이 있습니다.
정비: 고객 서비스에만 사용할 수 있습니다.
운영자: 감독자에서 부여한 권한으로 정의된 기능을 사용할 수 있습니다.
새 사용자 프로필을 생성합니다.
비밀번호를 지정합니다.
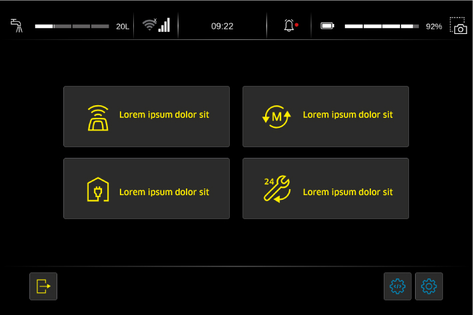
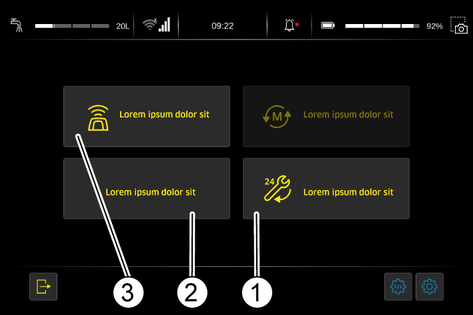
실행 가능한 기능이 메인 메뉴에 표시됩니다.
장비에 포함된 사용 설명서는 터치스크린에 결함이 있는 경우 문제 해결 및 시운전만을 다룹니다.
장치를 시운전한 후 전체 사용 설명서를 불러와 터치스크린에 표시할 수 있습니다.
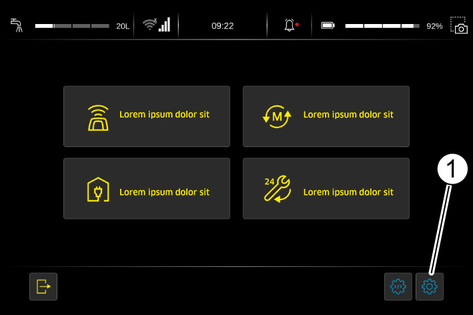
메인 메뉴에서 "데일리 케어" 버튼을 누르십시오.
"작동 설명서" 버튼을 누릅니다
사용 설명서가 터치스크린에 표시됩니다.
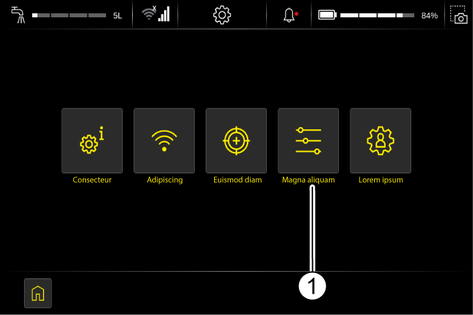
메인 메뉴에서 설정 버튼을 누릅니다.
설정 메뉴가 표시됩니다.
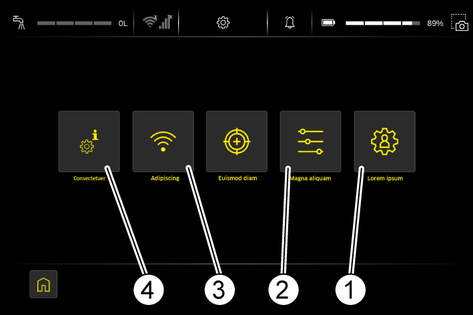
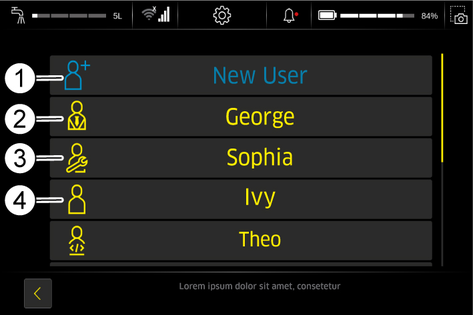
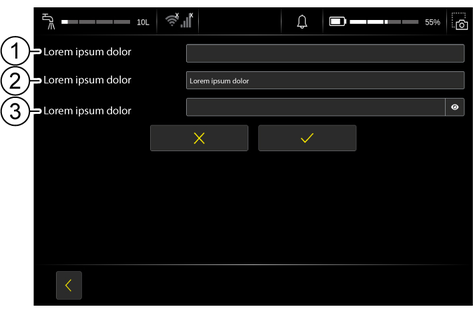
설정 메뉴에서 "사용자 프로필" 버튼을 누릅니다.
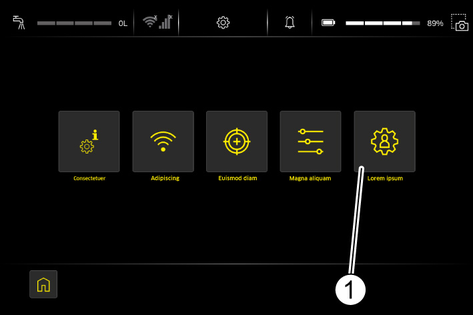
"새로운 사용자" 버튼을 누릅니다.
원하는 언어를 선택합니다.
사용자 이름의 입력 필드를 터치합니다.
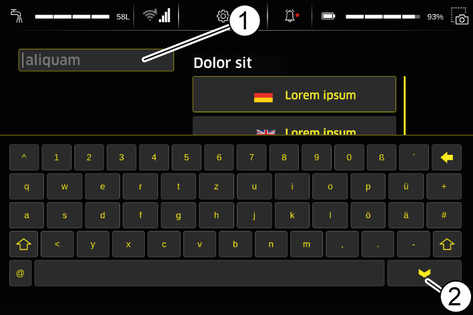
온스크린 키보드로 사용자 이름을 입력하고 Enter 키로 마칩니다.
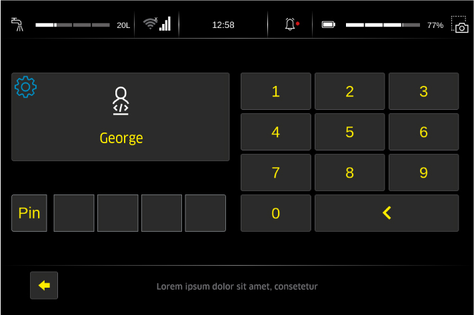
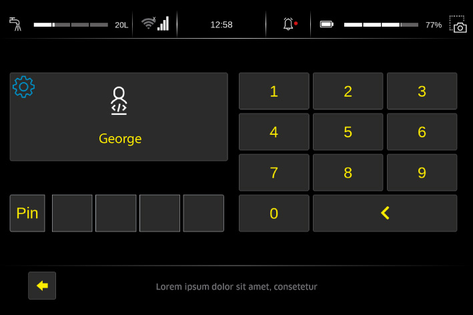
"PIN" 버튼을 누릅니다.
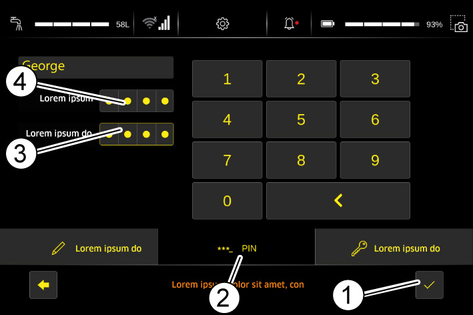
비밀번호 입력의 입력 필드를 터치합니다.
온스크린 키보드를 사용하여 비밀번호를 입력합니다.
확인을 위해 비밀번호를 비밀번호 확인 입력 필드에 다시 입력합니다.
확인 버튼을 누릅니다.
"권한" 버튼을 누릅니다-
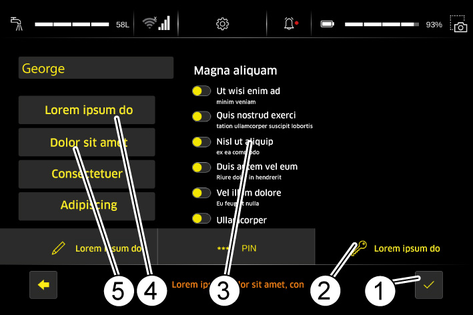
원하는 사용자 그룹 운영자 또는 감독자의 공장 설정 버튼을 누릅니다.
필요한 경우 목록에서 개별 권한을 변경합니다.
확인 버튼을 누릅니다.
"설정" 메뉴에서 "인터넷" 버튼을 누릅니다.
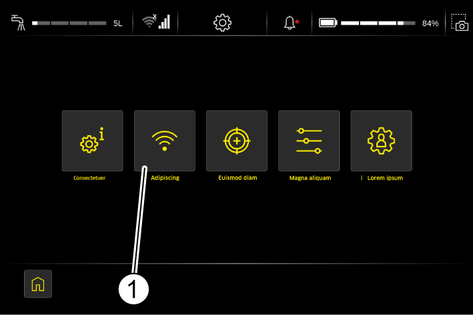
"가시 네트워크" 및 "알려진 네트워크"가 표시됩니다.
"설정" 버튼을 누릅니다.
현재 네트워크 설정이 표시됩니다.

"WIFI"가 활성화되면 이제 "가시 네트워크"와 "알려진 네트워크"가 표시됩니다.
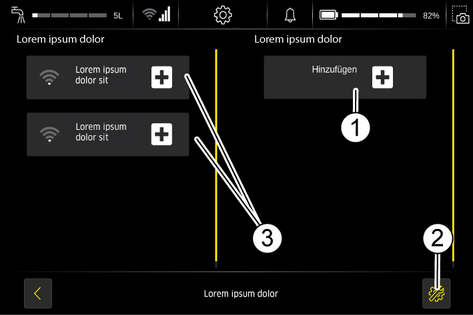
"설정" 메뉴에서 "인터넷" 버튼을 누릅니다.
"추가" 버튼을 누릅니다.
무선 액세스 지점/라우터의 SSID를 입력합니다.
암호화를 선택합니다.
비밀번호를 입력합니다.
체크 표시를 클릭합니다.
네트워크가 추가됩니다.
"설정" 메뉴에서 "일반 설정" 버튼을 누릅니다.
"일반 설정" 버튼을 누릅니다.
현재 일반 설정이 표시됩니다.
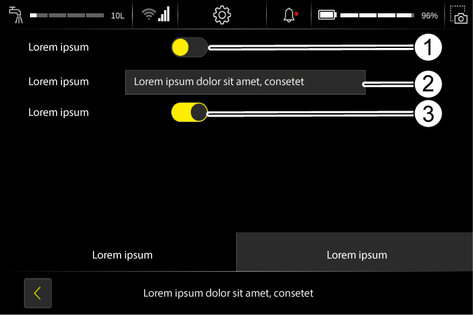
"경고등"을 활성화하면 경고등이 활성화됩니다.
적용되는 시간대는 "시간대 설정"에서 설정할 수 있습니다.
"신속 모드"를 활성화하면 신속 모드가 활성화됩니다.
신속 모드 활성화됨 | |
신속 모드 비활성화됨 | 최대 3.6 km/h |
도킹은 장비를 옵션 도킹 스테이션에 연결합니다. 도킹에 성공하면 다음 작업이 수행됩니다.
폐수 탱크를 비우고 세정합니다.
청수 탱크를 채웁니다.
배터리가 충전됩니다.
메인 메뉴에서 "도킹" 버튼을 누르십시오.
장비가 도킹을 준비 중이며 위치 코드를 찾습니다.
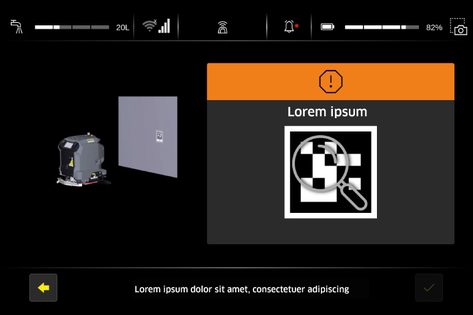
안전 스위치를 활성화하고 장비를 도킹 스테이션 앞으로 밉니다.
도킹 포트를 도킹 스테이션에 맞춰 정렬합니다.
도킹 스테이션으로부터 약 2m의 간격을 유지합니다.
장비가 도킹 스테이션에서 위치 코드를 감지할 때까지 기다립니다.
위치 코드를 확인합니다.
장비가 도킹 스테이션에 연결된 경우, 다음 기능을 수행할 수 있습니다.
수동 작동 시 작업자는 청소하고자 하는 영역으로 장비를 안내합니다.
터치스크린에서 "수동 클리닝" 기능을 선택합니다.
안전 스위치를 작동하고 작동 상태를 유지하십시오.
장비를 사용 장소로 밉니다.
안전 스위치에서 손을 떼십시오.
물의 양, 세제 투입량, 브러시 강도 및 흡입력에 대해 원하는 설정을 선택합니다.
필요한 기능(흡입, 클리닝 헤드, 사이드 브러시)을 활성화합니다.
활성화된 기능은 녹색으로 표시됩니다.
사이드 브러시는 클리닝 헤드가 켜져 있을 때에만 활성화될 수 있습니다.
안전 스위치를 작동하고 작동 상태를 유지하십시오.
청소 하고자 하는 영역으로 장비를 밉니다.
클리닝 헤드와 사이드 브러시를 비활성화합니다.
남은 물을 흡입하기 위해 짧은 구간을 주행합니다.
흡입을 비활성화합니다.
자율 작동 시 장비는 이전에 학습된 하나 이상의 영역을 자동으로 청소합니다. 학습은 루트를 주행하고 저장하는 방식으로 이루어집니다.
위치 코드는 시작점에 장착되어야 합니다. 루트의 끝이 다른 루트의 시작점 역할을 하는 경우 루트 끝에 위치 코드 역시 있어야 합니다. 위치 코드는 위치 파악에 사용됩니다.
위치 코드 장비와 함께 제공됩니다.
위치 코드 코팅은 식별성을 저해하므로 코팅해서는 안 됩니다.
하나의 클리닝 개체에서 모든 위치 코드는 서로 다른 코드를 가져야 합니다.
동일한 위치 코드가 다양한 루트에 포함될 수 있습니다.
모든 위치 코드는 66 cmcm 높이의 수직 표면에 부착되어야 합니다.
위치 코드의 전략적 배치는 설정 가이드에 자세히 설명되어 있습니다.
자율 작동의 안정적이고 안전한 실행을 위해 다음과 같은 규칙을 준수해야 합니다.
다음 위치에 장벽으로 청소 영역을 구분하십시오.
층계참
계단
에스컬레이터, 무빙워크
리프팅 장치
청소 구역에 사다리, 비계 또는 기타 일시적인 장애물을 남겨두지 마십시오.
전기 케이블 또는 기타 높이가 낮은 장애물(최대 15cm 높이)을 청소 구역에 두지 마십시오.
자율 작동 루트는 자동으로 열리는 엘리베이터나 문을 통과하지 않아야 합니다. 엘리베이터 및 자동문은 수동 작동 시에만 사용하십시오.
수조 및 유리 표면에 대해 충분한 간격을 유지하십시오.
센서에 강한 직사광선(예: 깊이 비치는 태양광)이 닿지 않도록 하십시오.
강한 빛/그림자 경계를 오가지 않도록 하십시오.
자율 루트에서는 롤링 셔터에 정면으로 접근하지 말고 롤링 셔터와 평행하게 접근하십시오.
청소 구역에 경고 표시를 설치하고 바닥이 젖어 있음을 표시하십시오.
학습 과정은 여기에 설명되어 있습니다. 설정 가이드에는 루트를 최적으로 설계하는 방법에 대한 정보가 포함되어 있습니다.
루트에 대한 다음의 정보는 학습 중에 저장됩니다.
장비의 이동 경로.
청소 기능이 켜지거나 꺼진 지점.
물 적용, 세제 투입량, 브러시 속도 및 흡입력에 대한 매개변수 설정.
경음기 작동(예: 교차로에서).
다음은 기록되지 않습니다:
학습 중 짧은 휴식 시간(5분 미만).
학습 중 주행 속도.
"감독자"로 로그인합니다.
"자율" 기능을 선택합니다.
"새 경로" 기능을 선택합니다.
다음을 확인합니다
배터리가 완전히 충전되었음
청수 탱크가 가득 차 있음
폐수 탱크가 비어 있음.
또는 메뉴를 종료하고 요청된 전제 조건을 충족시킵니다.
안전 스위치를 활성화하고 시작점의 위치 코드 앞으로 장비를 밉니다.
도킹 포트를 위치 코드에 맞춰 정렬합니다.
위치 코드에서 약 2m의 간격을 유지합니다.
장비가 위치 코드를 인식할 때까지 기다립니다.
위치 코드를 확인합니다.
물의 양, 세제 투입량, 브러시 강도 및 흡입력에 대해 원하는 설정을 선택합니다.
필요한 기능(흡입, 클리닝 헤드, 사이드 브러시)을 활성화합니다.
활성화된 기능은 녹색으로 표시됩니다.
사이드 브러시는 클리닝 헤드가 켜져 있을 때에만 활성화될 수 있습니다.
안전 스위치를 활성화하고 청소하고자 하는 영역으로 장비를 이동합니다. 다음과 같은 간격을 준수합니다.
장치의 오른쪽과 벽 사이 | 10 cm |
최소 통로 너비 | 1.05 m |
통로 회전 시 최소 통로 폭 | 1.7 m |
낙하 가장자리까지의 최소 측면 간격 | 1.5 m |
라이브 맵에 이미 작업한 구역이 표시됩니다.
루트를 종료하기 전에 사이드 브러시와 클리닝 헤드를 비활성화합니다.
흡입을 활성화한 상태로 짧은 거리를 주행하여 남아있는 물을 빨아들입니다.
흡입을 비활성화합니다.
루트가 도킹 스테이션에서 끝나는 경우, 도킹 스테이션에서 약 2미터 앞에 장비를 배치합니다.
루트의 끝을 다른 루트의 시작점으로 사용하려면 장비를 위치 코드 앞에 배치합니다.
루트 저장 버튼을 누르십시오.
- "경로 완료" 또는 "위치 코드로 경로 완료" 버튼을 누릅니다.
필요한 경우 장비가 위치 코드을 인식할 때까지 기다립니다.
필요한 경우 위치 코드를 확인합니다.
루트 이름의 입력 필드를 터치합니다.
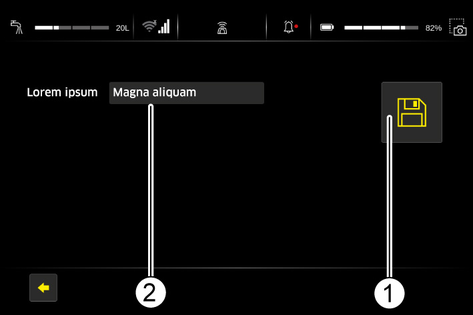
루트 이름을 입력합니다.
루트 저장 버튼을 누르십시오.
루트는 입력한 이름으로 저장됩니다.
Smart Fill 기능은 영역의 경계를 주행하여 영역을 학습시키기 위해 사용할 수 있습니다. 장비가 자율 작동 중 경계를 따라 주행한 영역을 청소합니다. 이때 영역 내 경로는 장비가 자체적으로 정의합니다.
이 기능으로 정의된 영역에는 장애물이 없어야 합니다.
효과적인 청소를 위해서는 Smart Fill에 적합한 영역을 계획하고 나머지 영역에 대한 청소 프로세스를 루트 학습 전에 계획하는 것이 좋습니다.
루트 학습을 시작하고 영역 경계의 시작점까지 작업합니다.
Smart Fill 버튼을 누릅니다.
Smart Fill 버튼은 하나 이상의 청소 기능이 활성화된 경우에만 터치 스크린에 나타납니다.
청소할 영역의 경계를 따라 주행합니다.
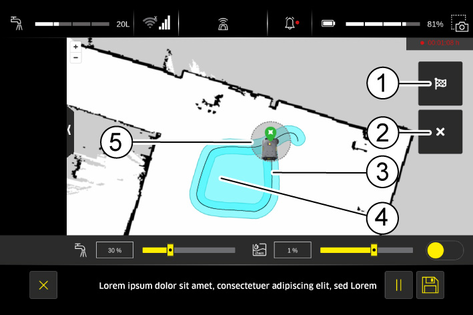
장비가 라이브 맵의 타겟 서클 안에 있을 때까지 해당 영역의 경계를 따라 주행해야 합니다.
Smart Fill 기능은 Smart Fill 취소 버튼을 눌러 취소할 수 있습니다.
타겟 서클의 라이브 맵에 장비가 있는 상태에서 Smart Fill 저장 버튼을 누릅니다.
루트 학습을 진행합니다.
Smart Fill 기능을 사용하여 하나의 루트에서 여러 영역을 정의할 수 있습니다.
"자율" 기능을 선택합니다.
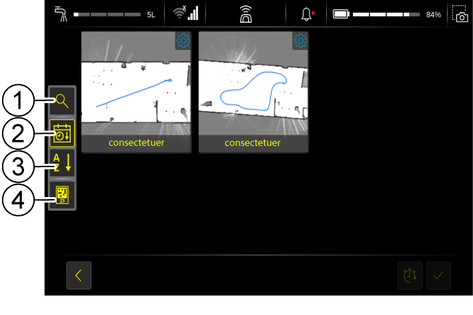
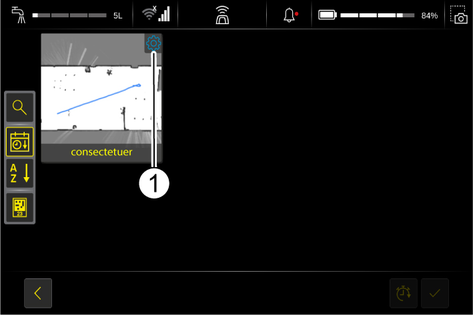
"기존 경로" 기능을 선택합니다.
이 기능을 사용하면 시작점의 위치 코드를 기준으로 루트가 정렬됩니다.
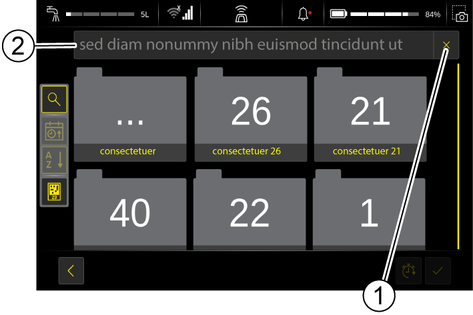
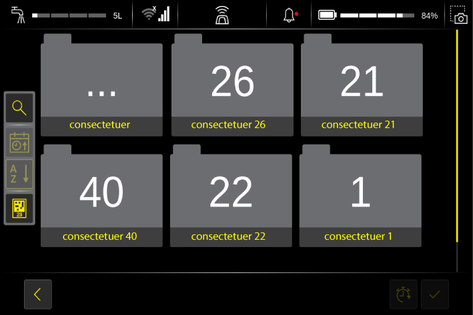
"위치 코드" 버튼을 클릭합니다.
사용 가능한 루트가 이제 "위치 코드"를 기준으로 정렬됩니다.
찾고 있는 위치 코드가 포함된 폴더를 탭하여 엽니다.
"루트 실행" 장에 설명된 루트를 시작합니다.
돋보기 버튼을 누릅니다.
입력 필드를 터치합니다.
찾고 있는 루트의 이름 또는 시작 위치 코드의 번호를 입력 필드에 입력합니다.
검색 버튼을 누릅니다.
찾은 루트가 표시됩니다.
"루트 직접 실행" 섹션에 설명된 대로 원하는 루트를 시작합니다.
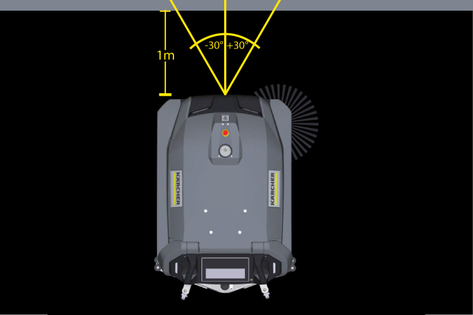
위치 코드 앞에 장비를 놓습니다.
장비는 + / - 30 °의 각도로 위치 코드 앞에서 1m 거리에 위치해야 합니다
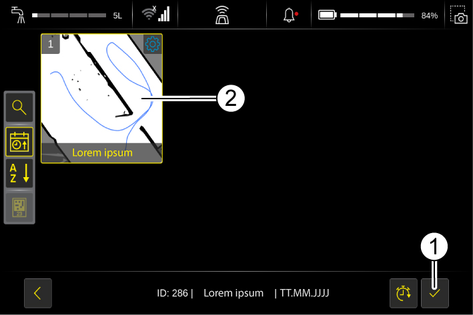
터치스크린에서 실행하고자 하는 루트의 버튼을 누릅니다.
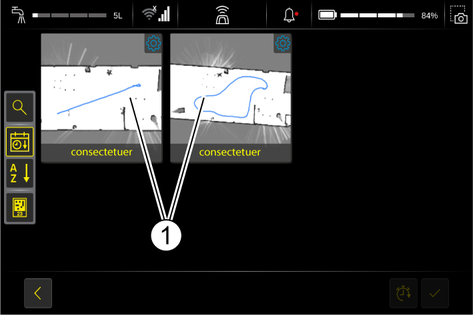
여러 루트를 순서대로 수행해야 하는 경우 다음 루트를 선택합니다.
첫 번째 루트를 선택한 후에는 시작점이 이전 루트의 끝점과 일치하는 루트만이 표시됩니다.
시작점과 끝점은 도킹 스테이션이어야 합니다.
루트는 선택한 순서대로 번호가 매겨집니다.
실수로 선택한 루트는 다시 탭하여 선택을 취소할 수 있습니다.
모든 루트를 선택했으면 확인 버튼을 누릅니다.
터치스크린에 요청된 위치 코드 앞에 장비를 밀어 넣습니다.
장비가 위치 코드를 인식할 때까지 기다립니다.
위치 코드를 확인합니다.
루트가 실행됩니다
선택한 루트는 위치 코드 없이 시작할 수 있습니다.
이 기능은 랜드마크를 영구적으로 장착하지 않는 경우에 사용할 수 있습니다. 티치인용 랜드마크를 장착한 후, 이것을 나중에 다시 제거할 수 있습니다.
루트를 선택합니다.
루트의 시작점에 장비를 놓습니다.
"랜드마크 없이 시작" 버튼을 클릭합니다.

장비가 선택한 루트 청소를 시작합니다.
선택한 루트를 최대 일주일의 지연 후 시작할 수도 있습니다.
루트를 선택합니다.
시계를 클릭합니다.
루트의 원하는 시작 시간을 선택합니다.
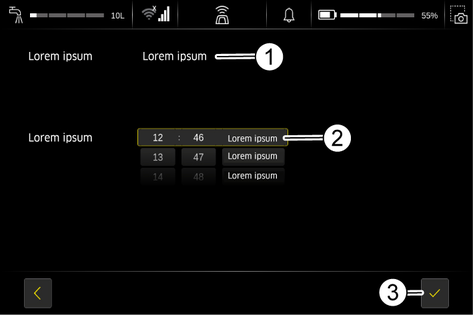
장비가 지정된 시간에 선택한 루트 청소를 시작합니다.
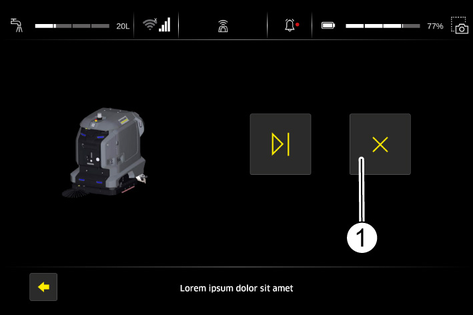
일시정지 버튼을 누릅니다.
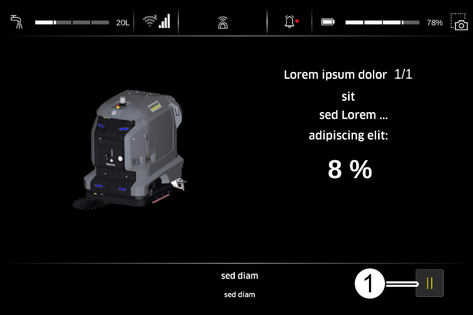
일시정지 버튼을 다시 누릅니다.
비밀번호를 입력하십시오.
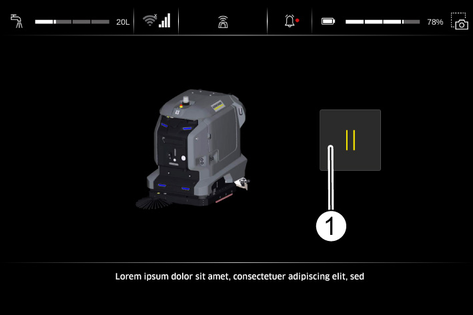
일시정지 버튼을 누릅니다.
일시정지 버튼을 다시 누릅니다.
비밀번호를 입력하십시오.
다음 버튼을 누릅니다
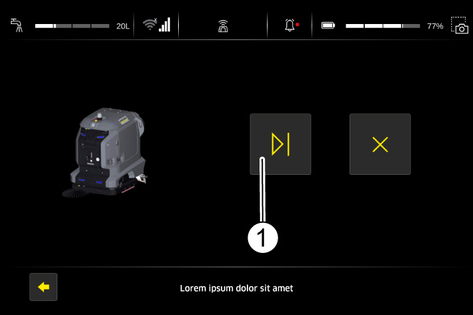
일시정지 버튼을 누릅니다.
일시정지 버튼을 다시 누릅니다.
비밀번호를 입력하십시오.
종료 버튼을 누릅니다
터치스크린에서 실행하고자 하는 루트의 버튼을 누릅니다.
설정 기호를 누릅니다.
디스플레이 왼쪽 가장자리에 있는 버튼으로 루트를 편집합니다.
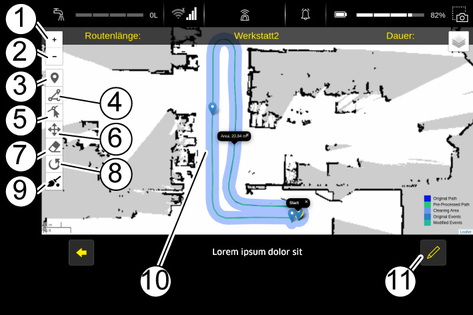
편집 버튼으로 추가 변경 옵션을 불러옵니다.
이벤트 생성은 "루트 편집" 권한이 있는 사용자만 구성할 수 있습니다.
"새 이벤트 배치" 버튼을 누릅니다.
이벤트에 대한 마커를 클릭하고 루트를 따라 배치합니다.
마커는 색상으로 구분할 수 있습니다.
"청소" 마커= 파란색
"경음기" 마커=주황색
이미 생성된 이벤트나 새로 생성된 이벤트는 나중에 이동할 수 있습니다. 이를 위해서는 마커를 누르고 움직여야 합니다.
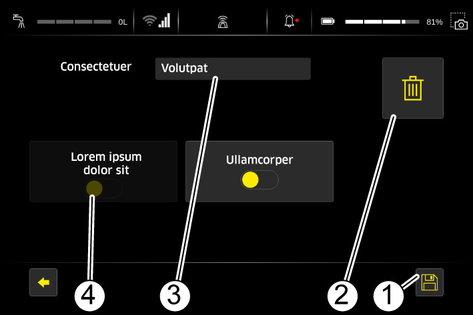
"청소" 마커 설정 시 청소 매개변수를 정의합니다.
뒤로를 클릭합니다.
이제 이 이벤트에 대한 청소 매개변수가 저장되었습니다.
클리닝 보고서에서 완료된 청소 작업의 결과를 확인할 수 있습니다.
클리닝 보고서 버튼을 누릅니다.
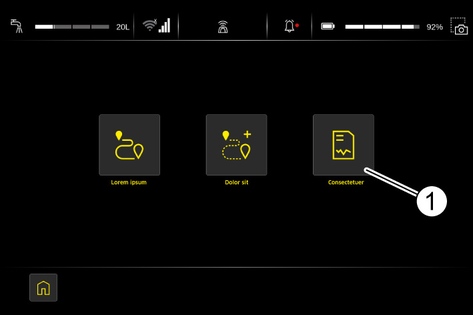
마지막으로 완료된 청소 작업이 표시됩니다.
세부 정보를 확인하려면 원하는 청소 작업을 누릅니다.
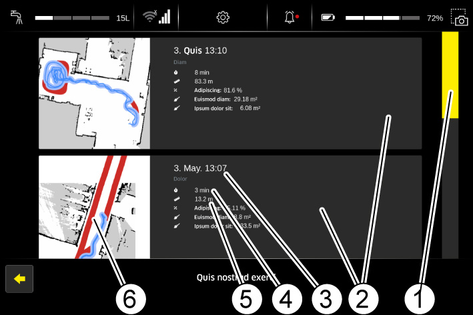
선택한 청소 작업의 세부 정보가 표시됩니다.
도킹 스테이션으로 작동하면 폐수 탱크가 자동으로 비워집니다.
도킹 스테이션 없이:
폐수의 오염물 및 세제는 잠재적으로 건강에 유해하거나 환경을 오염시킬 수 있습니다.
폐수 처리와 관련하여 적용되는 현지 규정을 준수하십시오.
장비 수납칸 도어를 엽니다.
홀더에서 배출 호스를 꺼내십시오.
적절한 수거 장치 위로 배수 호스를 내립니다.
미터링 장치를 압축하거나 또는 굽힙니다.
뚜껑을 엽니다.
미터링 장치를 누르거나 구부려 폐수의 흐름을 제어합니다.
폐수 탱크를 세정합니다.
뚜껑을 닫습니다.
장비 수납칸의 홀더에 배수 호스를 밀어 넣습니다.
장비 수납칸 도어를 닫습니다.
배수구 위에 장비를 놓습니다.
청수 탱크 잠금장치의 나사를 풉니다.
물을 배출시킵니다.
필요한 경우 체를 제거하고 청소합니다.
체를 제자리에 다시 놓습니다.
청수 탱크 잠금장치를 나사로 고정합니다.
호스 커넥터가 바닥에 오도록 잠금장치를 정렬합니다.
무게 미준수
부상 및 손상 위험
운반 및 보관 시 충전식 장비의 무게에 유의하십시오.
미끄러운 바닥이나 경사로에서 주행하지 마십시오.
청수 및 폐수 탱크를 비우십시오.
차량으로 운반하는 경우에는 유효한 지침에 따라 미끄러짐 및 전복이 발생하지 않도록 장비를 고정하십시오.
무게 미준수
부상 및 손상 위험
운송 및 보관 시 장치의 중량에 유의하십시오.
장비를 실내에만 보관하십시오.
장비가 의도치 않게 시작되어 전기가 흐르는 부품에 닿음
부상 위험, 감전
작업을 시작하기 전에 도킹 스테이션에서 장비를 분리하거나 전원 플러그를 뽑으십시오.
손상 위험
장비에 물을 분사하지 마십시오. 부식성 세제는 사용하지 마십시오.
주의사항: 도킹 스테이션이 있는 경우 "##" 표시가 있는 유지보수 작업이 자동으로 수행됩니다.
## 폐수를 배출시킵니다.
## 폐수 탱크를 세정합니다.
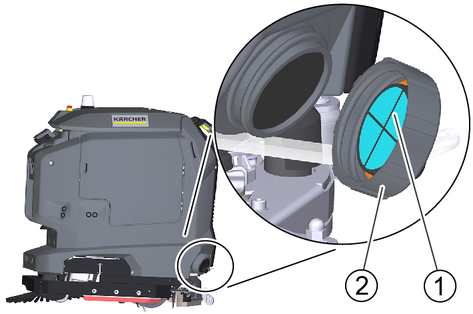
터빈 보호 필터를 청소하십시오.
폐수 탱크의 큰 오염물 체를 꺼내 청소하십시오.
천과 순한 비눗물로 장비 외부를 청소하십시오.
보풀 필터를 점검하고, 필요 시 청소합니다.
클리닝 헤드의 큰 입자 오염물 탱크를 분리하여 청소하십시오.
클리닝 헤드의 물 분배 바를 청소하십시오.
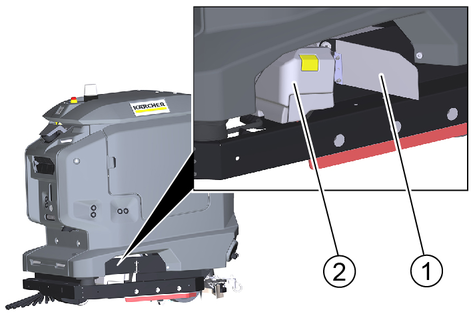
진공바의 석션립을 청소하고 마모 여부를 점검합니다. 마모된 석션립을 돌리거나 교체하십시오.
석션립이 진공바에 올바르게 안착되었는지 확인하십시오. 필요한 경우 석션립을 진공바의 홈에 올바르게 다시 삽입하십시오.
클리닝 헤드 양쪽의 와이퍼 립을 청소하고 마모 여부를 점검합니다. 마모된 와이퍼 립을 교체합니다.
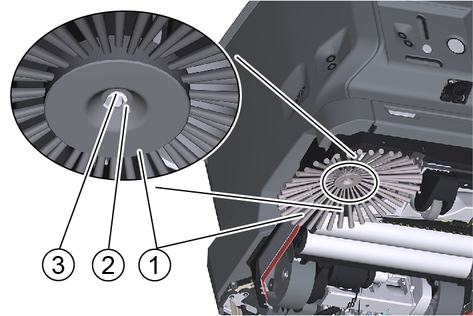
브러시의 마모 여부를 점검합니다. 마모된 브러시를 교체합니다.
주의사항: 노란색으로 표시된 솔이 다른 솔의 길이가 같으면 브러시 롤러가 마모된 것입니다.
## 배터리를 충전합니다.
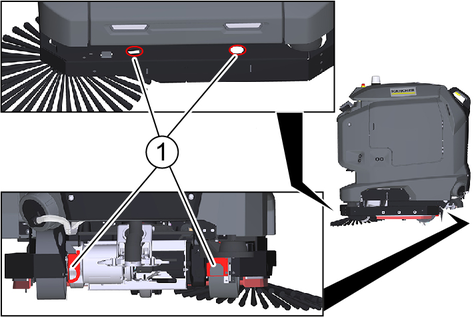
젖은 극세사 천으로 센서를 청소합니다. 필요한 경우 유리용 세제를 추가로 사용하십시오.
## 배터리를 정기적으로 사용하는 경우 적어도 1주일에 한 번씩 배터리를 충전하십시오.
폐수 탱크와 뚜껑 사이의 씰을 청소합니다.
폐수 탱크와 뚜껑 사이의 씰링을 점검하고 필요한 경우 씰링을 교체하십시오.
브러시 터널을 청소하십시오.
청수 필터를 청소하십시오.
장치를 장기간 사용하지 않는 경우 배터리가 완전히 충전된 상태에서만 장치를 끄십시오. 한 달에 한 번 이상 배터리를 충전하십시오.
고객 서비스에게 의뢰하여 필요한 점검을 실시합니다.
다양한 유지보수 작업이 장치에 애니메이션으로 저장되어 있으며, 터치스크린에서 불러올 수 있습니다.
메인 메뉴에서 "데일리 케어" 버튼을 누르십시오.
"유지 보수 방법" 버튼을 누릅니다.
찾고 있는 유지보수 작업을 터치합니다.
화살표 버튼을 사용하여 애니메이션의 개별 단계를 불러옵니다.
폐수 탱크의 뚜껑을 개방하십시오.
스냅 후크를 함께 누릅니다.
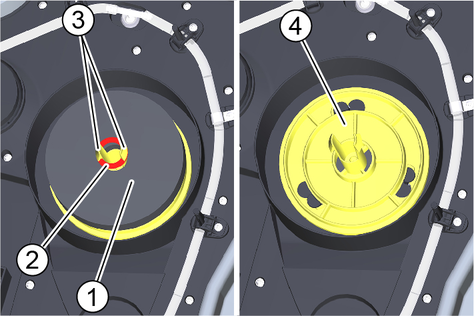
서클립을 빼냅니다.
플로터를 빼냅니다.
터빈 보호 체를 시계 반대 방향으로 돌립니다.
터빈 보호 체를 제거합니다.
체를 흐르는 물로 세척합니다.
터빈 보호 체를 다시 설치합니다.
플로터를 부착합니다.
서클립을 밀어 넣은 후, 스냅 후크까지 다시 당깁니다.
가벼운 오염의 경우 터빈 보호 체 설치 중 청소하는 것으로 충분합니다.
폐수 탱크의 뚜껑을 개방하십시오.
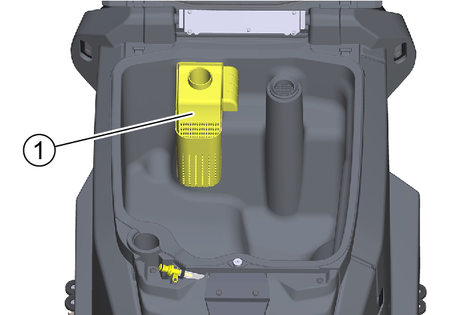
큰 오염물 체를 위로 당겨 분리합니다.
큰 오염물 체를 흐르는 물에 헹굽니다.
큰 오염물 체를 다시 폐수 탱크에 삽입합니다.
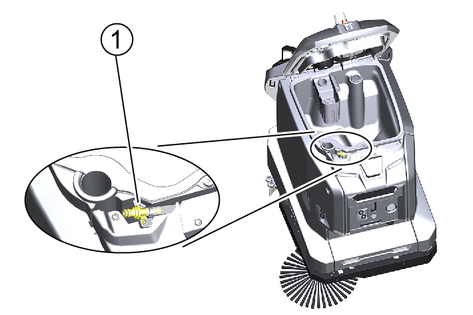
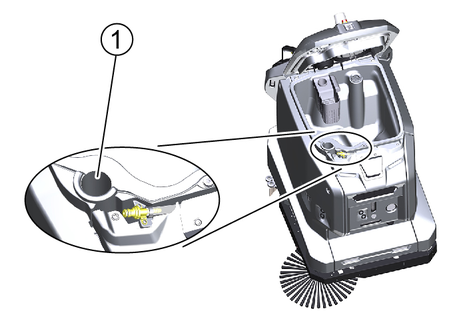
청수를 배출시킵니다("청수 배출” 챕터 참조).
청수 탱크의 잠금장치를 푸십시오.
청수 필터를 빼내고 깨끗한 물로 헹굽니다.
청수 필터를 삽입하십시오.
청수 탱크의 잠금장치를 부착합니다.
주의사항: 청수 탱크 잠금장치의 호스 연결부를 완전히 조인 후 가장 낮은 지점에 있는지 확인하십시오.
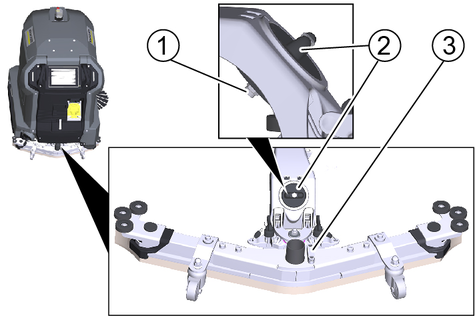
양쪽 날개 나사 풀기
장비에서 진공바를 제거합니다.
진공바에서 흡입 호스를 빼냅니다.
진공바 밑면을 물로 세정합니다.
천으로 석션립을 깨끗이 닦습니다.
장비에 진공바를 삽입합니다.
양쪽 날개 나사를 단단히 조입니다.
흡입 호스를 진공바에 연결합니다.
선셕립이 마모 마크까지 마모되면 뒤집히거나 교체합니다.
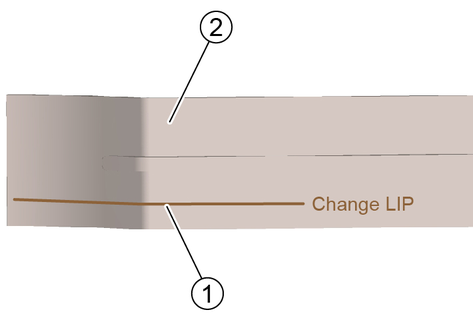
장비에서 진공바를 제거합니다.
스타 그립을 풉니다.
슬리브와 디플렉터 롤러를 제거합니다.
엔드 피스를 떼어냅니다.
석션립을 세로 방향으로 당겨 빼냅니다.
새 석션립 또는 뒤집은 석션립을 진공바 안으로 밀어 넣습니다.
엔드 피스를 밀어 넣습니다.
디플렉터 롤러와 슬리브를 장착합니다.
스타 그립을 돌리고 단단히 조입니다.
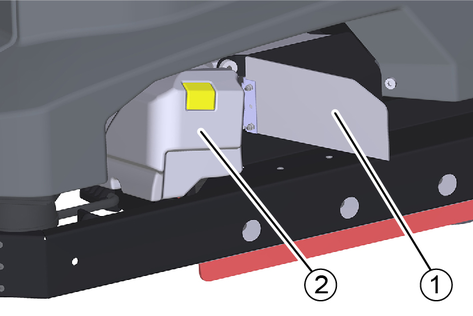
큰 입자 오염물 탱크 도어를 엽니다.
큰 입자 오염물 탱크를 위로 올리고 당겨 분리합니다.
큰 입자 오염물 탱크를 비우고 필요한 경우 청소합니다.
큰 입자 오염물 탱크를 다시 삽입하십시오.
폐수 탱크를 비우십시오. 배수 호스의 뚜껑을 열어 배수구 위에 둡니다.
터치스크린에서 "데일리 케어" 메뉴를 엽니다.
"탱크 헹굼" 기능을 시작합니다.
탱크 뚜껑으로 인한 부상 위험!
탱크 뚜껑이 의도치 않게 닫히는 경우 사지의 압착 위험이 있습니다.
의도치 않게 닫히지 않도록 탱크 뚜껑을 끝까지 여십시오.
탱크와 탱크 뚜껑 이에 사지가 존재하지 않는 경우에만 탱크 뚜껑을 닫으십시오.
폐수 탱크 뚜껑을 엽니다.
급수 호스를 장비의 호스 커플링에 연결합니다
폐수 탱크의 뚜껑을 닫습니다.
물 공급구를 엽니다.
약 30초 동안 세정 과정을 수행합니다.
물 공급구를 닫습니다.
"탱크 헹굼" 기능을 종료합니다.
장비에서 물 공급 호스를 분리합니다.
폐수 배출 호스를 닫고 브래킷 안으로 누릅니다.
장비 수납칸 도어를 닫습니다.
폐수 탱크를 비우십시오. 배수 호스의 뚜껑을 열어 배수구 위에 둡니다.
탱크 뚜껑으로 인한 부상 위험!
탱크 뚜껑이 의도치 않게 닫히는 경우 사지의 압착 위험이 있습니다.
의도치 않게 닫히지 않도록 탱크 뚜껑을 끝까지 여십시오.
탱크와 탱크 뚜껑 이에 사지가 존재하지 않는 경우에만 탱크 뚜껑을 닫으십시오.
폐수 탱크 뚜껑을 엽니다.
폐수 탱크를 물 호스를 사용하여 수작업으로 세정합니다.
폐수 배출 호스를 닫고 브래킷 안으로 누릅니다.
장비 수납칸 도어를 닫습니다.
큰 입자 오염물 탱크 도어를 엽니다.
큰 입자 오염물 탱크를 위로 올리고 당겨 분리합니다.
물 분배 바를 들어 올려 빼냅니다.
물 분배 바를 청소하십시오.
물 분배 바를 다시 설치하십시오.
큰 입자 오염물 탱크를 삽입합니다.
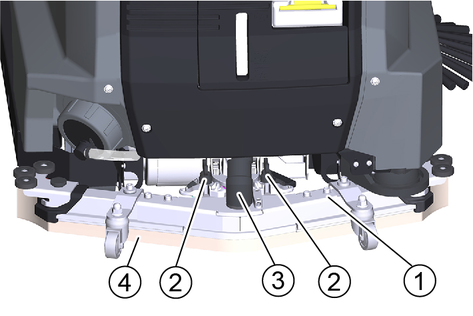
푸시 버튼을 누르고 충격 보호 장치를 옆으로 돌립니다.
잠금 해제 버튼을 누릅니다.
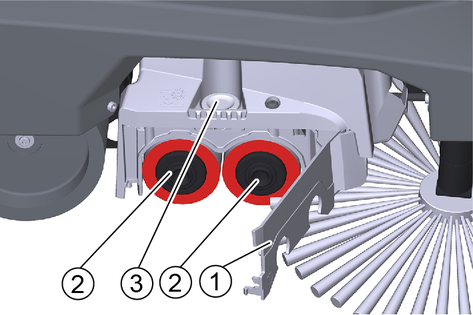
베어링 캡을 돌려 빼냅니다.
브러시 롤러를 빼냅니다.
주의사항: 노란색으로 표시된 솔과 다른 솔의 길이가 같으면 브러시 롤러가 마모된 것입니다.
새 브러시 롤러를 삽입하고 앞뒤로 돌려 캐리지 중앙에 놓습니다.
베어링 캡을 뒤로 돌리고 브러시 롤러의 엔드 캡을 베어링 캡에 끼웁니다.
와이퍼 립을 들어 올리고 충격 보호 장치를 뒤로 돌려 고정합니다.
3개의 나사를 푸십시오.
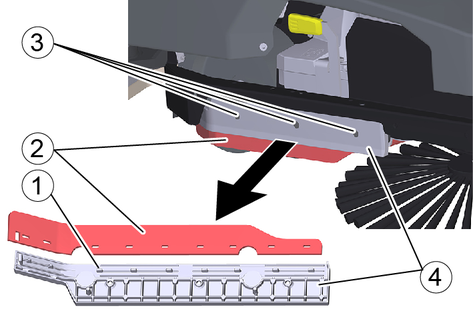
와이퍼 립과 홀더를 제거합니다.
홀더에서 마모된 와이퍼 립을 제거합니다.
새 와이퍼 립을 홀더의 핀에 끼웁니다.
홀더를 와이퍼 립과 함께 장치에 다시 장착합니다.
장비의 반대쪽에서도 이 과정을 반복하십시오.
날개 나사를 푸십시오.
사이드 브러시를 제거하십시오.
새 사이드 브러시를 끼웁니다.
날개 나사에 와셔를 끼우고 단단히 조입니다.
감전으로 인한 위험.
도킹 스테이션에서 작업하기 전에 소켓에서 전원 플러그를 뽑으십시오.
커버를 제거합니다.
플로터 스위치와 플로터를 점검하고 필요한 경우 청소하십시오.
폐수 트레이를 청소하고 물로 헹굽니다.
덮개를 부착합니다.
위치 코드를 젖은 수건으로 닦으십시오.
도킹 푸셔가 자유롭게 움직이는지 점검합니다.
도킹 스테이션의 적절한 사용을 위해 도킹 스테이션 전면에 2x2m2의 개방된 공간을 제공해야 합니다
젖은 극세사 천으로 그림에 표시된 모든 센서를 청소합니다. 필요한 경우 유리용 세제를 추가로 사용하십시오.
청소 후 장치를 다시 시작합니다.
내부 오류
원인:
해결:
내부 오류가 발생했습니다. 로봇을 다시 시작하십시오. 오류가 지속되면 서비스 센터에 문의하십시오.
비상 정지 버튼 작동함
원인:
해결:
로봇의 동작 및 청소가 중단되었습니다. 로봇과 주변 공간을 확인하십시오. 위험이 없는 경우 비상 정지 버튼을 해제하십시오.
비상 정지 버튼 해제됨
원인:
해결:
비상 정지 버튼이 해제되었습니다. 로봇이 정상 작동을 계속합니다.
폐수 탱크 뚜껑 열렸거나 막힘
원인:
폐수 배출구가 열렸지만 로봇의 폐수 수위가 변경되지 않았습니다. 탱크 뚜껑이 열려 있거나 폐수 배출구가 막혔을 수 있습니다.
해결:
폐수 탱크 뚜껑을 닫습니다. 폐수 배출구와 폐수 탱크의 손상 및 막힘을 확인하십시오.
도킹 스테이션에 전원 공급 없음
원인:
로봇의 온보드 충전기에 전원이 공급되지 않습니다.
해결:
도킹 스테이션이 콘센트에 올바르게 연결되어 있는지 확인하십시오. 도킹 스테이션의 전원 케이블이 손상되었는지 확인하세요. 콘센트에 전압이 공급되는지 확인하십시오. 도킹 포트의 전원 커넥터가 손상되었는지 확인하십시오.
도킹 스테이션에 물 공급 없음
원인:
도킹 스테이션의 욕조에 있는 플로트 스위치가 활성화되었습니다.
해결:
도킹 스테이션 욕조의 물이 배수되지 않습니다. 도킹 스테이션에 손상 및 막힘이 있는지 확인하십시오. 도킹 스테이션의 욕조에 있는 플로트 스위치가 자유롭게 움직일 수 있고 상태가 양호한지 확인하십시오.
도킹 스테이션 막힘
원인:
도킹 스테이션에 도킹할 수 없습니다.
해결:
로봇, 도킹 스테이션 및 주변 환경을 확인하십시오. 장애물을 제거하십시오.
도킹 실패
원인:
로봇의 현재 위치 정보가 손실되었습니다.
해결:
로봇을 위치 코드로 이동하고 청소 작업을 시작합니다. 오류가 지속되면 경로를 다시 학습시키십시오.
현재 위치 정보 문제
원인:
해결:
운영자가 실행 중인 자동 작업을 취소했습니다.
자동 작업 취소됨
원인:
학습된 스마트 채우기 영역을 처리할 수 없습니다.
해결:
경로를 다시 학습시키고 복잡한 스마트 채우기 도형을 피하십시오(예: 스마트 채우기 중에 경로 교차를 피하십시오).
스마트 채우기 실패
원인:
해결:
로봇을 지정된 경로로 되돌립니다.
로봇이 지정된 경로를 이탈
원인:
해결:
로봇이 청소 작업을 성공적으로 마쳤습니다.
청소 작업 완료됨
원인:
경로가 막혀서 로봇이 멈췄습니다.
해결:
로봇 주변을 확인합니다. 경로에서 장애물을 제거합니다.
경로 막힘
원인:
절벽 레이저 스캐너가 먼지를 감지하였으며 더 이상 제대로 작동하지 않습니다.
해결:
절벽 레이저 스캐너를 청소하고 파손 여부를 확인하십시오. 로봇을 다시 시작한 후에도 오류가 지속되면 서비스 센터에 문의하십시오.
절벽 레이저 스캐너 더러움
원인:
후면 레이저 스캐너가 먼지를 감지하였으며 더 이상 제대로 작동하지 않습니다.
해결:
후면 레이저 스캐너를 청소하고 파손 여부를 확인합니다. 로봇을 다시 시작한 후에도 오류가 지속되면 서비스 센터에 문의하십시오.
후면 레이저 스캐너 오염됨
원인:
후면 레이저 스캐너가 먼지를 감지하였으며 더 이상 제대로 작동하지 않습니다.
해결:
후면 레이저 스캐너를 청소하고 파손 여부를 확인합니다. 로봇을 다시 시작한 후에도 오류가 지속되면 서비스 센터에 문의하십시오.
전면 레이저 스캐너 오염됨
원인:
전면 레이저 스캐너가 먼지를 감지하였으며 더 이상 제대로 작동하지 않습니다.
해결:
전면 레이저 스캐너를 청소하고 파손 여부를 확인합니다. 로봇을 다시 시작한 후에도 오류가 지속되면 서비스 센터에 문의하십시오.
소프트웨어 업데이트 실패
원인:
소프트웨어 업데이트를 올바르게 설치할 수 없습니다.
해결:
시스템이 이전 소프트웨어 상태로 리셋되었습니다.
소프트웨어 업데이트 성공
원인:
해결:
소프트웨어 업데이트가 성공적으로 설치되었습니다.
소프트웨어 업데이트 시작됨
원인:
소프트웨어 업데이트를 설치하고 있습니다.
해결:
로봇을 끄지 마십시오.
새로운 업데이트 있음
원인:
소프트웨어 업데이트가 성공적으로 다운로드되었으며 설치할 준비가 되었습니다.
해결:
설정 메뉴에서 소프트웨어 업데이트를 시작하십시오.
배터리가 완전히 충전됨
원인:
해결:
배터리가 완전히 충전되었고 로봇이 작동할 준비가 되었습니다.
배터리 방전
원인:
해결:
배터리를 즉시 충전하십시오.
배터리 부족
원인:
해결:
곧 배터리를 충전하십시오.
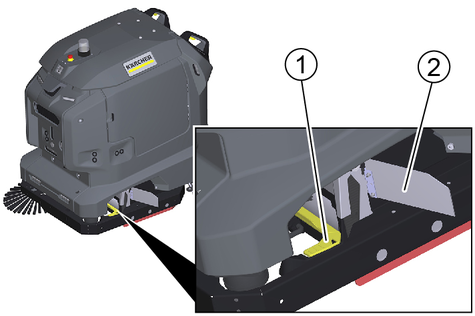
브레이크 테스트에 실패했습니다. 수동 브레이크 해제 확인
원인:
로봇이 체결된 브레이크를 테스트하는 동안 움직임이 감지되었습니다.
해결:
브레이크가 체결되지 않았을 가능성이 높습니다. 바퀴 사이의 빨간색 레버를 오른쪽으로 밀어 브레이크를 체결합니다.
브레이크 테스트가 필요합니다. 핸들 스위치를 활성화 상태로 유지하십시오
원인:
핸들 스위치가 활성화되었고 브레이크 테스트가 필요합니다.
해결:
브레이크 테스트가 완료되고 브레이크가 해제되어 로봇을 다시 움직일 수 있을 때까지 핸들 스위치를 활성화된 상태로 유지하십시오.
로그아웃한 동안에는 모터 지원 없음
원인:
절벽 레이저 스캐너가 절벽를 감지해서 안전 정지를 트리거했습니다. 절벽 근처에서 로봇을 수동으로 조작하는 것은 사용자가 로그인한 상태에서만 허용됩니다.
해결:
절벽 근처에서 로봇을 조작하는 경우 사용자 프로필로 로그인합니다.
사용자가 로그인되지 않은 상태에서 절벽이 감지됨
원인:
절벽 레이저 스캐너가 절벽를 감지해서 안전 정지를 트리거했습니다. 절벽 근처에서 로봇을 수동으로 조작하는 것은 사용자가 로그인한 상태에서만 허용됩니다.
해결:
절벽 근처에서 로봇을 조작하는 경우 사용자 프로필로 로그인합니다.
청소 모듈 점검
원인:
청소 모듈이 제대로 작동하는지 점검합니다.
해결:
로봇이 청소 모듈 점검을 마칠 때까지 기다리십시오. 최대 30초가 소요될 수 있습니다
심한 진공도 하락
원인:
해결:
진공 호스가 회수 탱크와 스퀴지에 단단히 연결되어 있는지 확인하십시오. 진공 호스, 스퀴지 및 스퀴지 블레이드의 손상 여부를 확인하십시오. 물이 올바르게 흡입되는지 확인하십시오.
진공 시스템 오류
원인:
해결:
진공 호스와 스퀴지에 막힘이나 손상이 있는지 확인하십시오.
브러시 모터 과부하
원인:
해결:
브러시의 상태가 양호하고 자유롭게 회전할 수 있는지 확인하십시오.
오수 탱크 가득 참
원인:
탱크 뚜껑이 열렸거나 오수 탱크가 가득 차서 오수 탱크의 플로트 스위치가 활성화되었습니다.
해결:
오수 탱크를 배수하십시오.
청수 흐르지 않음
원인:
해결:
바닥에 청수가 뿌려지지 않습니다. 청수 필터와 브러시 데크의 물 분배 채널을 청소하십시오. 로봇을 다시 시작한 후에도 오류가 지속되면 서비스 센터에 문의하십시오.
일반 | |
주행 속도 자율(최대) | 4,3 km/h |
주행 속도 수동(최대) | 5,5 km/h |
이론적 시간당 청소 면적 자율 | 2365 m2/h |
이론적 시간당 청소 면적 수동 | 3025 m2/h |
탱크 충전당 면적 성능 | 1833 m2/h |
담수/폐수 탱크 용량 | 55 l |
큰 입자 오염물 탱크 용량 | 2 l |
세제 탱크 용량 (도스 옵션) | 5 l |
세제 미터링 | 0...3 % |
워터 미터링 | 0...2,7 l/min |
치수 | |
길이 | 1062 mm |
폭, 진공바 제외 | 760 mm |
넓은 진공바 | 750 mm |
높이 | 1161 mm |
작업폭 | 550 mm |
사이드 브러시 포함 작업 폭 | 768 mm |
통로 폭 자율(최소) | 1000 mm |
가장자리 간격 자율(최소) | 100 mm |
포장 치수 lxwxh | 1165x880x1395 mm |
타이어 | |
전방 휠, 폭 | 32 mm |
전방 휠, 직경 | 100 mm |
후방 휠, 폭 | 80 mm |
후방 휠, 직경 | 200 mm |
무게 | |
허용 총중량 | 285 kg |
빈 중량 (운반 중량) | 228 kg |
브러시 압박력, 최대 | 181 (18,5) N (kg) |
브러시 압력, 최대 | 7858 (80,1) N/m2 (g/cm2) |
표면 압력 | |
가이드 롤러 | 0,61 N/mm2 |
후방 휠 | 0,53 N/mm2 |
장치 성능 | |
배터리 수 | 2 |
정격 전압, 리튬 이온 | 25,6 V |
배터리 용량, 리튬 이온 | 160 Ah (5 h) |
평균 입력 전력 | 1600 W |
구동 모터 출력 | 2x280 W |
석션 터빈 출력 | 630 W |
브러시 드라이브 출력 | 600 W |
완충 배터리 사용 시 작동 시간 | 3,5 h |
배터리 충전 시간 | 8 h |
보호 등급 | IPX3 |
진공 | |
흡입출력, 공기량 | 16,8...22,2 l/s |
부압 (최대) | 10,1...13,2 (101...132) kPa (mbar) |
청소 브러시 | |
브러시 길이 | 550 mm |
브러시 속도 | 1350 1/min |
내부 충전기 | |
정격전압 | 100...240 V |
주파수 | 50-60 Hz |
충전 전류 | <7,5 A |
출력 | 760 W |
환경 조건 | |
허용 온도 범위 | 5...40 °C |
최대 물 온도 | 50 °C |
충진 시스템 수압 | 1 (10) MPa (bar) |
폐수 탱크 세척 시스템 수압 | 1 (10) MPa (bar) |
상대 습도 | 20...90 % |
경사 | |
작업 영역 최대 경사 | 6 % |
EN 60335-2-72에 따른 조사값 | |
수동 암 진동값 | 0,3 m/s2 |
불확실성 K | 0,2 dB(A) |
음압 레벨 LpA | 69 dB(A) |
불확실성 KpA | 2 dB(A) |
음향 파워 레벨 LWA + 불확실성 KWA | 84 dB(A) |
저희는 아래에 기술된 기계가 그 설계 및 구조뿐만 아니라 당사가 시장에 제공한 버전을 바탕으로 EU 지침의 안전 및 건강 관련 요건을 준수함을 선언합니다. 당사의 동의 없이 기계를 변경할 경우, 이 선언의 유효성은 무효가 됩니다.
제품: 바닥용 청소기
유형: 1.533-xxx
관련 EU 지침2006/42/EC(+2009/127/EC)
2014/30/EU
2014/53/EU (TCU)
적용되는 통일 표준EN 60335-1
EN 60335-2-29
EN 60335-2-72
EN 62311: 2008
EN 55012: 2007 + A1: 2009
EN 61000-6-2: 2005
EN 61000-6-3: 2007 + A1:2011
EN 61000-3-2: 2014
EN 61000-3-3: 2013
TCUEN 301 511 V12.5.1
EN 300 328 V2.2.2
EN 301 893 V2.1.1
EN 302 502 V2.1.1
EN 301 908-1 V11.1.1
EN 301 908-2 V11.1.2
EN 301 908-13 V11.1.2
적용되는 국가 표준-
서명인은 이사진으로부터 전권을 위임받아 권한을 대리합니다.

문서 작성 책임자:
S. Reiser
Alfred Kärcher SE & Co. KG
Alfred-Kärcher-Str. 28 - 40
71364 Winnenden (Germany)
전화: +49 7195 14-0
팩스: +49 7195 14-2212
Winnenden, /11/01