KIRA rolling gate control, transmitter

59802760 (07/25)
59802760 (07/25)
 Lesen Sie vor dem Umbau diese Montageanleitung und handeln Sie danach.
Lesen Sie vor dem Umbau diese Montageanleitung und handeln Sie danach.
Bewahren Sie die Montageanleitung für späteren Gebrauch oder für Nachbesitzer auf.
Der Umbausatz besteht aus:
Komponente | Bezeichnung | Anzahl [Stück] |
|---|---|---|
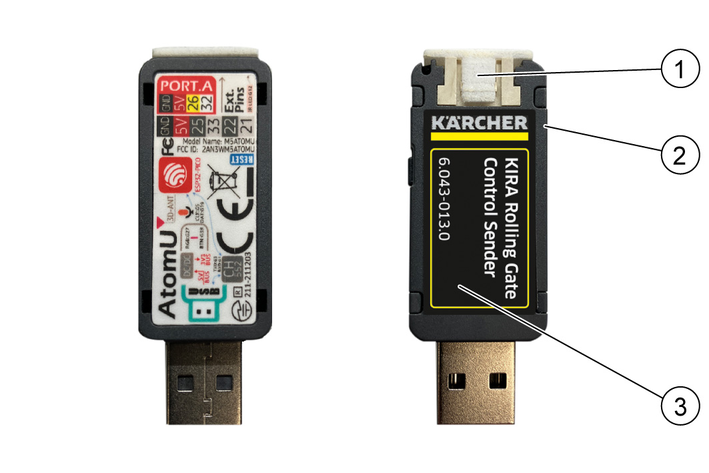
6.043-017.0 | USB-Stick, Sender | 1 |
5.043-365.0 | Schutzdeckel USB-Stick, Sender | 1 |
6.043-016.0 | Aufkleber USB-Stick, Sender | 1 |
5.980-276.0 | Umbauanleitung Rolltorsteuerung, Sender | 1 |
Schutzdeckel und Aufkleber sind bei Lieferung vormontiert.
Der Erweiterungssatz Rolltorsteuerung darf ausschließlich an Rolltoren mit Kraftbegrenzungseinrichtungen oder berührungslos wirkende Schutzeinrichtungen wie z. B. Tore des Typs C (oder D/E) nach DIN EN 12453 verwendet werden.
Der Erweiterungssatz Rolltorsteuerung für 2 Relais besteht aus 2 Modulen:
KIRA Rolling Gate Control, Sender
KIRA Rolling Gate Control, Empfängermodul
Sender und Empfängermodul sind vom Benutzer zu montieren.
Hinweis auf eine unmittelbar drohende Gefahr, die zu schweren Körperverletzungen oder zum Tod führt.
Hinweis auf eine möglicherweise gefährliche Situation, die zu schweren Körperverletzungen oder zum Tod führen kann.
Hinweis auf eine möglicherweise gefährliche Situation, die zu leichten Verletzungen führen kann.
Hinweis auf eine möglicherweise gefährliche Situation, die zu Sachschäden führen kann.
Unabsichtlich anlaufendes Gerät, Berührung von stromführenden Teilen
Verletzungsgefahr, Stromschlag
Trennen Sie vor allen Arbeiten das Gerät von der Docking-Station oder ziehen Sie den Netzstecker. Die Verpackungsmaterialien sind recyclebar. Bitte Verpackungen umweltgerecht entsorgen.
Die Verpackungsmaterialien sind recyclebar. Bitte Verpackungen umweltgerecht entsorgen.
 Elektrische und elektronische Geräte enthalten wertvolle recyclebare Materialien und oft Bestandteile wie Batterien, Akkus oder Öl, die bei falschem Umgang oder falscher Entsorgung eine potenzielle Gefahr für die menschliche Gesundheit und die Umwelt darstellen können. Für den ordnungsgemäßen Betrieb des Geräts sind diese Bestandteile jedoch notwendig. Mit diesem Symbol gekennzeichnete Geräte dürfen nicht mit dem Hausmüll entsorgt werden.
Elektrische und elektronische Geräte enthalten wertvolle recyclebare Materialien und oft Bestandteile wie Batterien, Akkus oder Öl, die bei falschem Umgang oder falscher Entsorgung eine potenzielle Gefahr für die menschliche Gesundheit und die Umwelt darstellen können. Für den ordnungsgemäßen Betrieb des Geräts sind diese Bestandteile jedoch notwendig. Mit diesem Symbol gekennzeichnete Geräte dürfen nicht mit dem Hausmüll entsorgt werden.
Aktuelle Informationen zu Inhaltsstoffen finden Sie unter: www.kaercher.de/REACH
Nur Original-Zubehör und Original-Ersatzteile verwenden, sie bieten die Gewähr für einen sicheren und störungsfreien Betrieb des Geräts.
Informationen über Zubehör und Ersatzteile finden Sie unter www.kaercher.com.
In jedem Land gelten die von unserer zuständigen Vertriebsgesellschaft herausgegebenen Garantiebedingungen. Etwaige Störungen an Ihrem Gerät beseitigen wir innerhalb der Garantiefrist kostenlos, sofern ein Material- oder Herstellungsfehler die Ursache sein sollte. Im Garantiefall wenden Sie sich bitte mit Kaufbeleg an Ihren Händler oder die nächste autorisierte Kundendienststelle.
Nähere Informationen finden Sie unter: www.kaercher.com/dealersearch
Weitere Garantieinformationen (falls vorhanden) finden Sie im Service-Bereich Ihrer lokalen Kärcher-Webseite unter "Downloads".
Unabsichtlich anlaufendes Gerät, Berührung von stromführenden Teilen
Verletzungsgefahr, Stromschlag
Trennen Sie vor allen Arbeiten das Gerät von der Docking-Station oder ziehen Sie den Netzstecker.Sachschäden durch fehlerhafte Montage
Lassen Sie die Montage nur von einer dafür qualifizierten Fachkraft durchführen.Beachten Sie unbedingt auch die Betriebsanleitung und die Sicherheitshinweise des Reinigungsroboters.
Erforderliches Werkzeug:
TORX 15 Schraubendreher
Den Reinigungsroboter ausschalten, siehe Betriebsanleitung des Reinigungsroboters.
Den Reinigungsmitteltank ausbauen.
Die Abdeckung abnehmen.
Den Reinigungsmitteltank entnehmen.
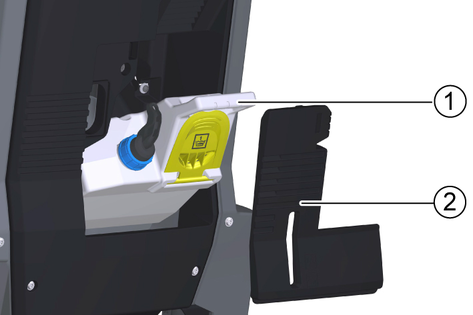
Die Abdeckung des USB-Ports mit einem TORX 15 Schraubendreher entfernen.
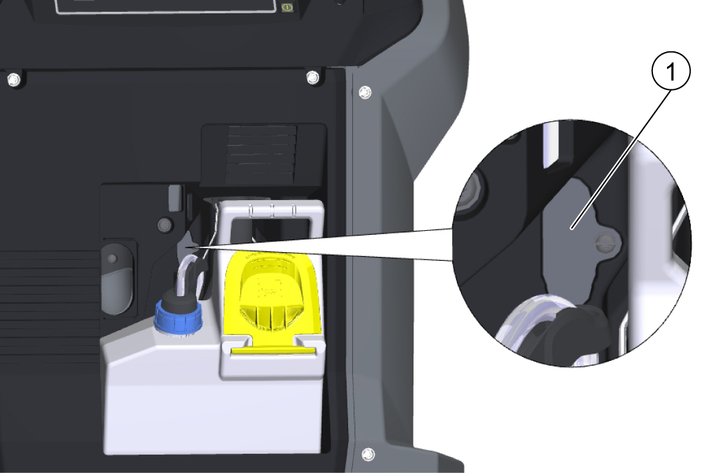
Den USB-Stick in den USB-Port stecken.
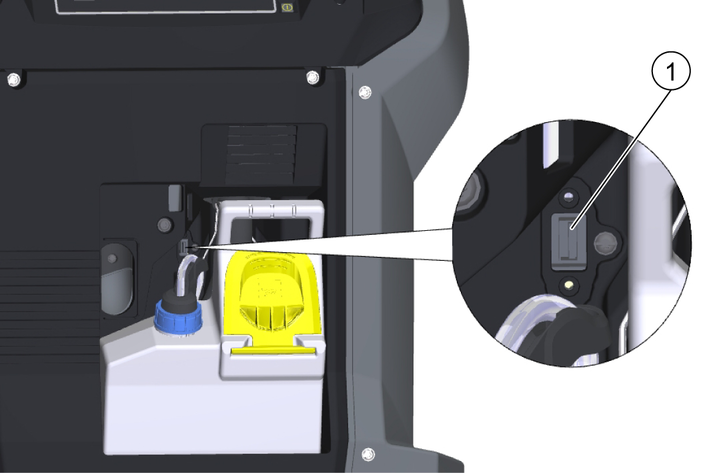
Den Reinigungsmitteltank einbauen.
Den Reinigungsmitteltank einsetzen. Dabei darauf achten, den Sender nicht zu beschädigen.
Die Abdeckung aufsetzen.
Den Reinigungsroboter einschalten, siehe Betriebsanleitung des Reinigungsroboters.
Den Reinigungsroboter ausschalten, siehe Betriebsanleitung des Reinigungsroboters.
Den USB-Stick montieren:
Die Tür des Gerätefachs öffnen.
Die Schrauben am Deckel herausdrehen und den Deckel abnehmen.
Den USB-Stick in die USB-Buchse einstecken.
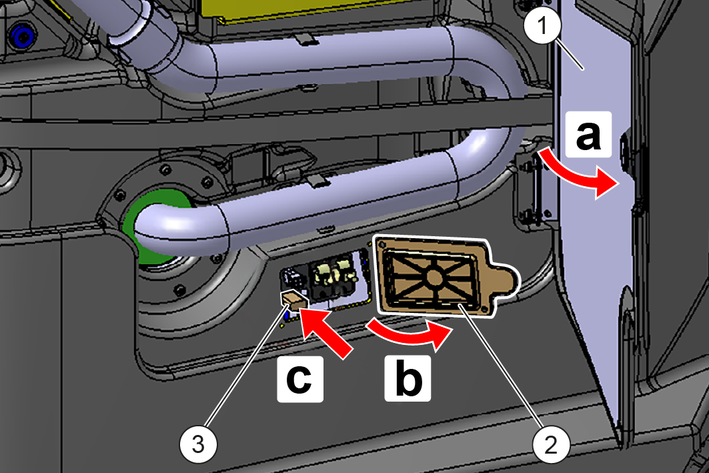
Den Deckel anbringen und die Schrauben anziehen.
Die Tür des Gerätefachs schließen.
Den Reinigungsroboter einschalten, siehe Betriebsanleitung des Reinigungsroboters.
Voraussetzungen:
Für jedes einzurichtende Rolltor ist ein Empfänger montiert.
Der Reinigungsroboter ist umgerüstet und befindet sich im Sendebereich des Empfängers.
Das Bedienpanel mit der Starttaste einschalten.
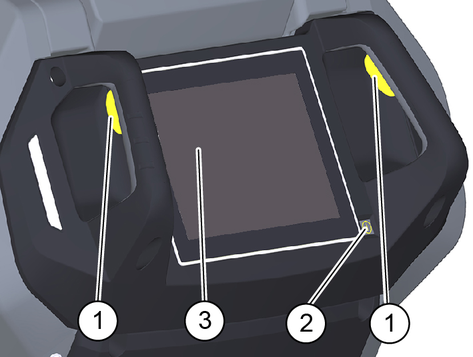
Das Symbol Einstellungen auf dem Touchscreen drücken.

Das Menü Infrastructure wählen.

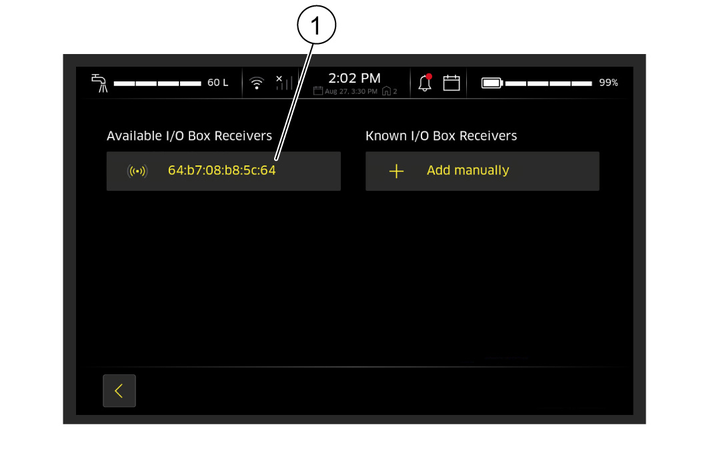
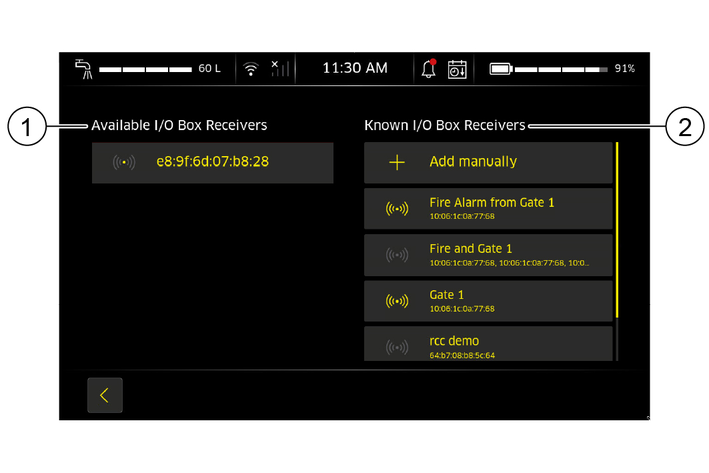
I/O Box Setup wählen.

Alle auswählbaren Empfänger werden angezeigt.
Einen Empfänger (Rolltor) aus der Liste auswählen.
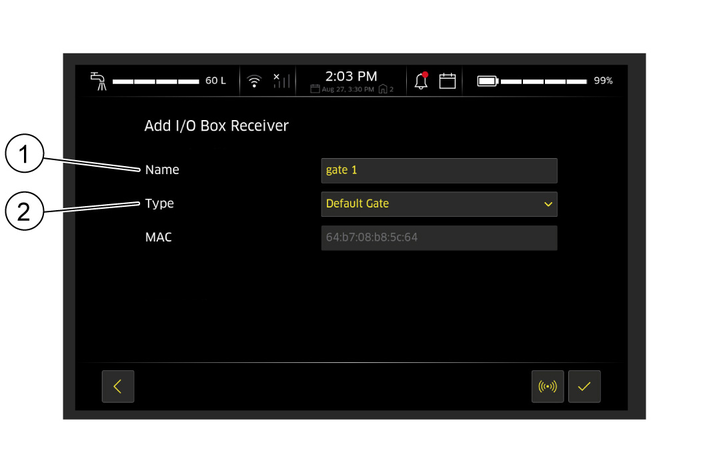
Dem Empfänger (Rolltor) einen Namen und einen Typ zuweisen.
Dem Empfänger den Typ “Default-Gate” zuweisen.
Wenn Sie pro Tor (Gate) einen Empfänger angelegt haben, weisen Sie dem Tor den Typ “Default-Gate zu. Wenn der Reinigungsroboter eine Default-Gate-Zone erreicht, löst er die Torsteuerung des zugehörigen Empfängers aus.
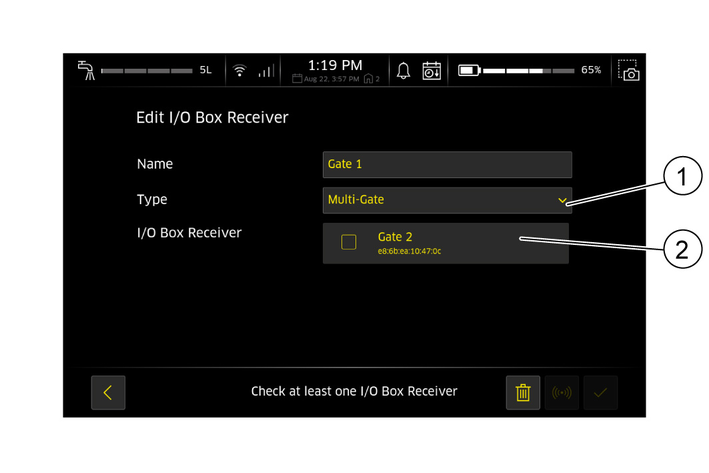
Optional: Dem Empfänger den Typ “Multi-Gate” zuweisen.
Ein Multi-Gate bietet die Möglichkeit, mehrere Tore (Gates) innerhalb einer Zone zu öffnen. Das heißt, wenn der Reinigungsroboter eine Multi-Gate-Zone erreicht, löst er die Torsteuerung mehrerer Empfänger aus. Dies kann von Vorteil sein, wenn mehrere Rolltore nebeneinander liegen, z. B. in einer Ecke.
Mit den Auf- und Ab-Tasten die Funktion des Senders testen.
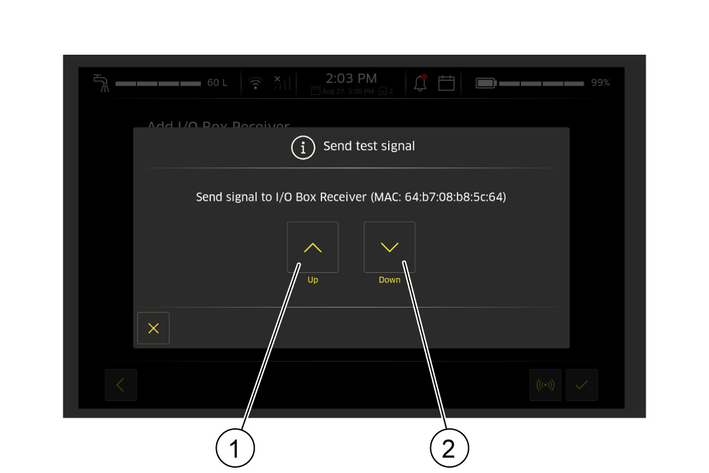
Die Auswahl durch Drücken des Häkchens bestätigen.
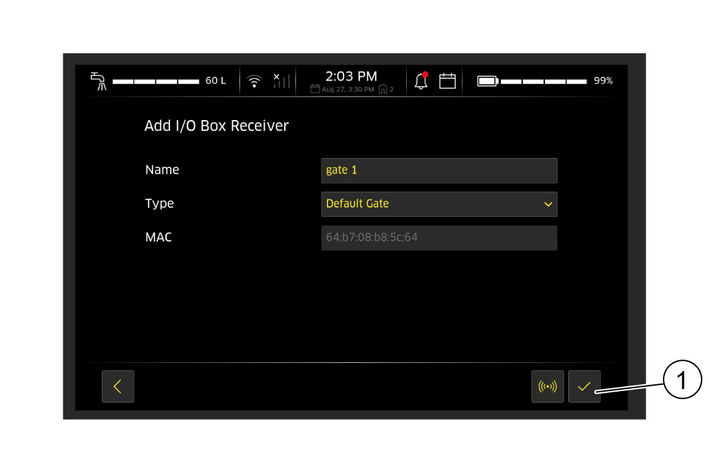
Schritt 5 … 8 für weitere Empfänger (Rolltore) wiederholen.
In die Kartenbearbeitung wechseln. Siehe Betriebsanleitung des Reinigungsroboters KIRA B 50.
Das Symbol Einstellungen auf dem Touchscreen drücken.
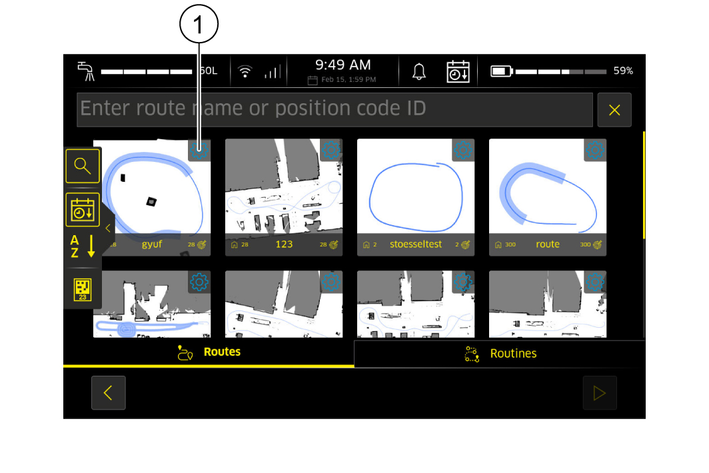
Zone einrichten.
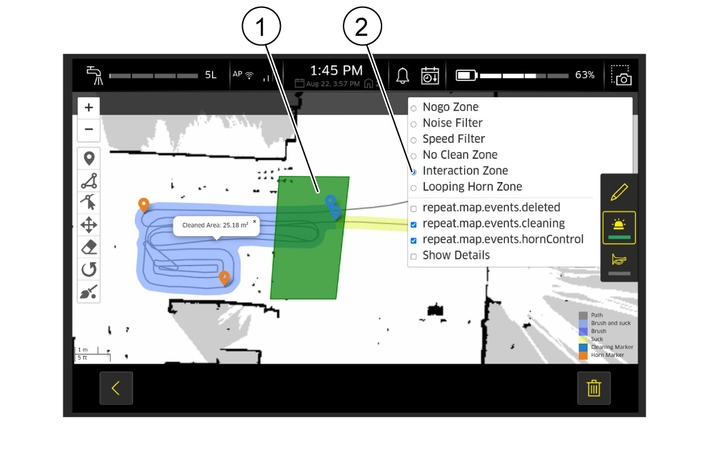
Die Zonenauswahl öffnen. Der grüne Bereich definiert die Zone, in der die Torsteuerung anspricht.
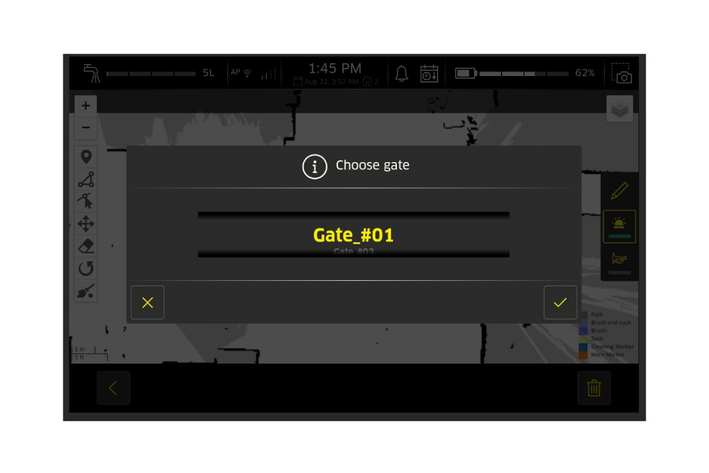
Tor auswählen. Es gibt keine Standardzuweisung für eine Zone, d. h., wird kein Tor ausgewählt, spricht die Torsteuerung in der Zone nicht an.
„Interaktionszone“ auswählen.
Der Reinigungsroboter öffnet beim Betreten der grünen Zone das zugewiesene Tor.
Voraussetzungen
Für jedes einzurichtende Rolltor ist ein Empfängermodul mit Voltmeter montiert.
Der Reinigungsroboter ist umgerüstet und befindet sich im Sendebereich des Empfängers.
Der Reinigungsroboter ist mit eingestecktem Sender (USB-Stick) hochgefahren.
Das Bedienpanel mit der Starttaste einschalten.
Das Symbol Einstellungen auf dem Touchscreen drücken.
Das Menü
Alle auswählbaren Empfänger werden angezeigt.
Einen Empfänger (Rolltor) aus der Liste auswählen.
Dem Empfänger (Rolltor) einen Namen und einen Typ zuweisen.
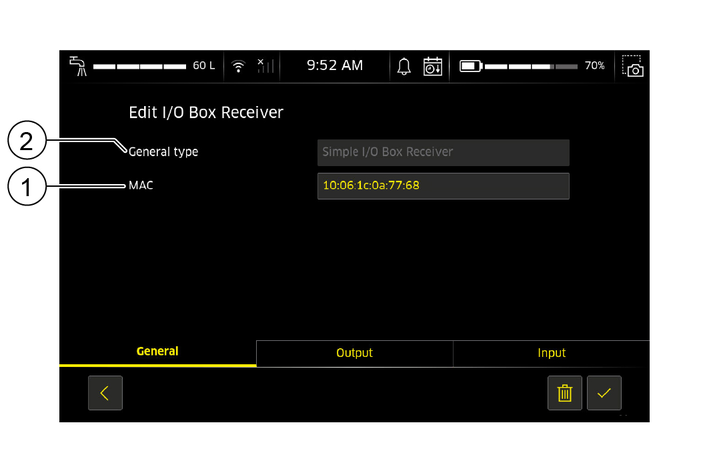
Dem Empfänger einen Typ zuweisen.
Dem Empfänger eine “MAC-Adresse” zuweisen.
Zum Empfänger kann ein Ausgangssignal und / oder vom Empfänger ein Eingangssignal eingestellt werden.
Ausgangssignal: Der Reinigungsroboter sendet ein Signal an den Empfänger, um Tore in den entsprechenden Interaktionszonen zu öffnen.
Eingangssignal: Der Reinigungsroboter empfängt bei einem Feueralarm ein Signal vom Empfänger. Die Wiederholung in den entsprechenden Interaktionszonen wird automatisch unterbrochen.
Ein Ausgangssignal zum Empfänger einstellen.
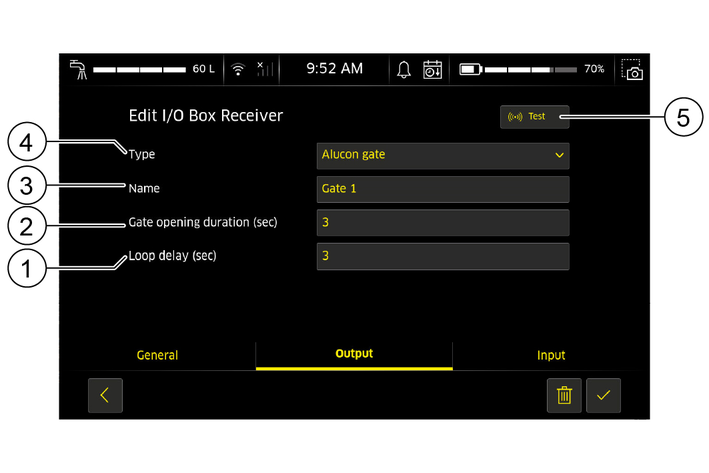
Den Typ auswählen.
Den Namen vergeben.
Einen Wert in Sekunden für die Dauer der Toröffnung eingeben. Da einige Tore den Öffnungsvorgang stoppen, wenn der Öffnungsbefehl ein zweites Mal gesendet wird, kann hier eingestellt werden, wie lange der Reinigungsroboter nach dem ersten Befehl wartet.
Einen Wert in Sekunden für die Schleifenverzögerung eingeben. Da sich Alucon-Tore nach einiger Zeit automatisch schließen, kann festgelegt werden, nach welcher Zeit der Öffnungsbefehl erneut gesendet wird.
Um die Verbindung zu testen, die Testtaste drücken.
Ein Eingangssignal vom Empfänger einstellen.
Es gibt Brandmeldeanlagen die oberhalb eines bestimmten Schwellenwertes und Anlagen, die unterhalb einer bestimmten Spannung auslösen. Beide Optionen sind wählbar. Im gezeigten Beispiel fällt die Spannung im Falle eines Feueralarms unter 10 V.
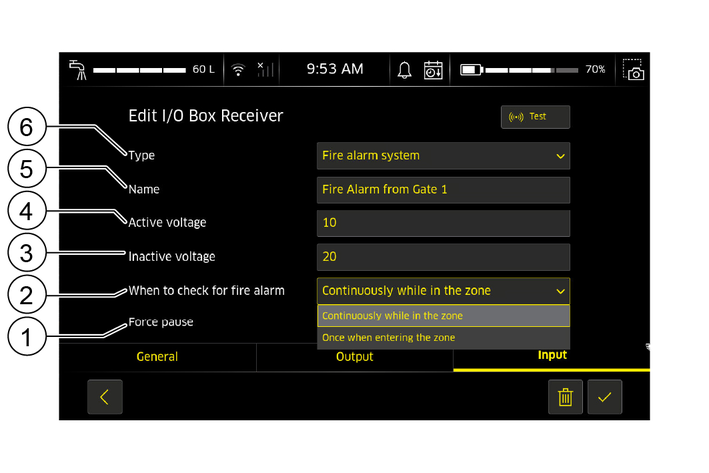
Als Typ
Einen
In
In
Auswählen, wann der Reinigungsroboter auf Feueralarm achten soll. 2 Möglichkeiten stehen zur Auswahl:
Kontinuierlich: Solange sich der Reinigungsroboter in der Interaktionszone befindet, pausiert er die Wiederholung. Auf jeder Seite des Tors, auf der sich der Reinigungsroboter im Rahmen der Wiederholung nähert, sollte sich eine Zone befinden. Die Zone sollte nicht unterhalb des Tors liegen, da der Roboter dann auch direkt unterhalb des Tors pausieren würde, wenn dort der Feueralarm ausgelöst wird.
Einmal beim Betreten der Zone: Der Reinigungsroboter prüft den Feueralarm nur einmal, wenn er die Interaktionszone betritt. Ist der Feueralarm aktiv, hält er die Wiederholung an der Grenze der Zone an. Wenn der Feueralarm ausgelöst wird, während sich der Reinigungsroboter in der Mitte des Bereichs befindet, fährt er weiter. Diese Option kann mit einer Interaktionszone über dem Tor verwendet werden.
Erzwungene Pause aktivieren / deaktivieren.
Option aktiviert: Der Reinigungsroboter setzt sich auch über die Wiederholungsanforderung durch eine Person vor Ort hinweg. Die Wiederholung kann nicht fortgesetzt, sondern nur abgebrochen werden.
Option deaktiviert: Die Pause, die durch das Feueralarmsignal gesendet wurde, kann aufgehoben werden.
Option: Kombinierten Empfänger einrichten.
Um Interaktionszonen zu erstellen, die als Eingangs- und Ausgangsauslöser oder als Auslöser für mehr als nur ein Tor dienen, muss ein zusätzlicher kombinierter Empfänger erstellen werden, da überlappende Zonen nicht funktionieren.
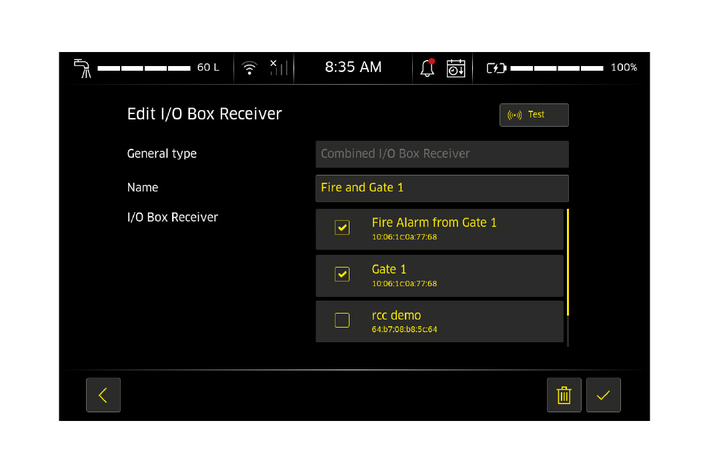
Beispiel für einen kombinierten Empfänger
Im gezeigten Beispiel erhält der kombinierte Empfänger die an „Tor 1“ gesendeten Befehle und den Eingang „Feueralarm von Tor 1“.
Durch Verwendung der Option Einmalig beim Betreten der Zone auf Feueralarm achten, wird verhindert, dass der Reinigungsroboter im Falle eines Feueralarms unter dem Tor angehalten werden kann.
Der Reinigungsroboter öffnet das Tor auch dann, wenn er beim Betreten der Zone angehalten wird. Ist dies nicht erwünscht, müssen separate Zonen für die Torsteuerung und den Feueralarm verwendet werden.
In die Kartenbearbeitung wechseln. Siehe Betriebsanleitung des Reinigungsroboters KIRA B 50.
Das Symbol Einstellungen auf dem Touchscreen drücken.
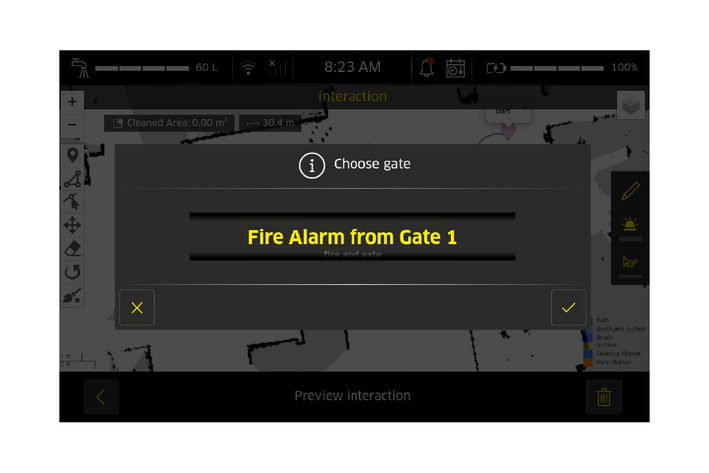
Interaktionszone einrichten.

Die Zonenauswahl öffnen. Der grüne Bereich definiert die Zone, in der die Torsteuerung anspricht.
Tor auswählen. Es gibt keine Standardzuweisung für eine Zone, d. h., wird kein Tor ausgewählt, spricht die Torsteuerung in der Zone nicht an.
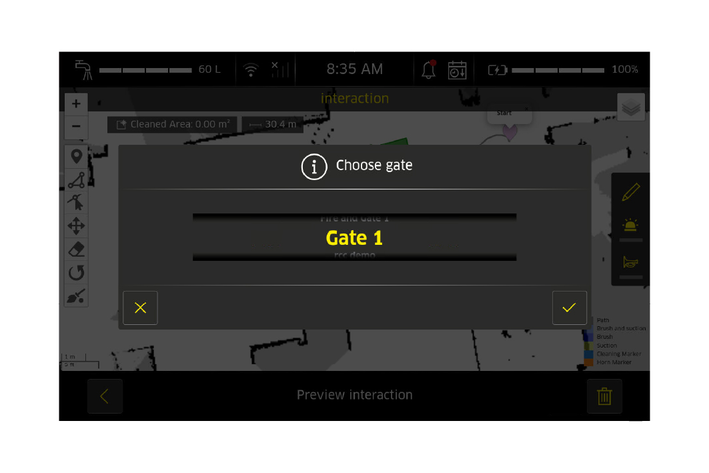
„Interaktionszone“ auswählen.
Der Reinigungsroboter öffnet beim Betreten der grünen Zone das zugewiesene Tor.
Separate Zonen für Feueralarm einrichten.
Die Interaktionsbereiche dürfen sich nicht überschneiden.
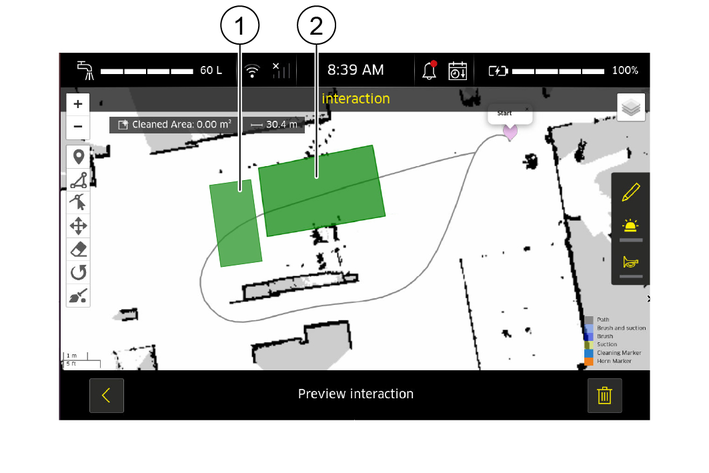
Die Zonenauswahl öffnen. Der grünen Bereiche definieren die Zonen, in der die Torsteuerung anspricht bzw. die Feueralarme ausgelöst werden.
Tor für Feueralarm auswählen.
Für
Kombinierte Interaktionszonen mit Feueralarm einrichten.
Der Reinigungsroboter öffnet das Tor auch dann, wenn der Reinigungsroboter beim Betreten der Zone angehalten wird. Verwenden Sie separate Zonen für die Torsteuerung und den Feueralarm, wie in Schritt 13 beschrieben, wenn dies nicht erwünscht ist.

Die Zonenauswahl öffnen. Der grüne Bereich definiert die Zone, in der die Torsteuerung anspricht und die Feueralarme ausgelöst werden.
Machen Sie die Bereiche so groß, dass das Tor bereits geöffnet ist, wenn der Reinigungsroboter es erreicht, damit der Reinigungsroboter reibungslos fahren kann.
Tor für Feueralarm auswählen.
Für
0-0-0-A4-GS-AW19869