KIRA rolling gate control, transmitter

59802760 (07/25)
59802760 (07/25)
 改装前请阅读安装说明并按说明行事。
改装前请阅读安装说明并按说明行事。
请妥善保管安装说明,以备日后查阅或供将来的设备所有者使用。
改装套件包括:
部件 | 名称 | 数量[件] |
|---|---|---|
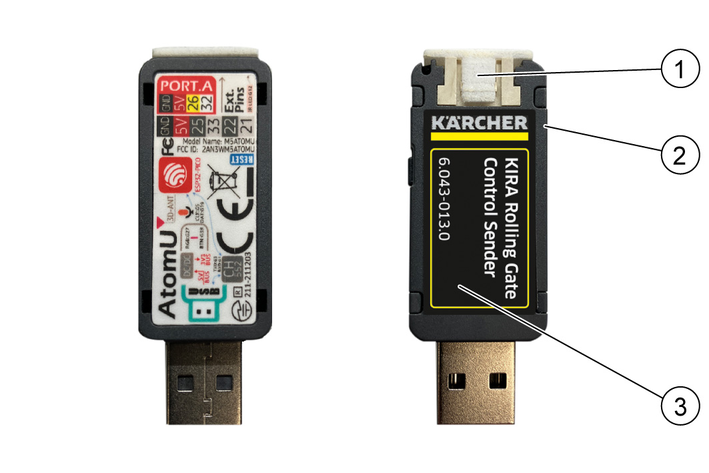
6.043-017.0 | U 盘,发射器 | 1 |
5.043-365.0 | U 盘保护盖,发射器 | 1 |
6.043-016.0 | U 盘标签,发射器 | 1 |
5.980-276.0 | 卷帘门控制系统发射器改装指南 | 1 |
保护盖和标签在交付时已预先装好。
卷帘门控制系统扩展套件只能用于带有力限制装置或非接触式保护装置的卷帘门,例 如符合 DIN EN 12453 标准的 C (或 D/E)类型门。
用于 2 个继电器的卷帘门控制系统扩展套件由 2 个模块组成:
KIRA 卷帘门控制系统发射器
KIRA 卷帘门控制系统接收器模块
发射器和接收器模块需要由用户进行安装。
提示导致人员重伤或死亡的直接威胁性危险。
提示可能导致人员重伤或死亡的危险状况。
提示可能导致轻度伤害的危险状况。
提示可能产生财产损失的危险状况。
无意中启动设备,接触带电部件
受伤危险,触电
在执行任何工作之前,请将设备与对接站断开,或拔出电源插头。 包装材料可以回收利用。请按照环保要求处理包装。
包装材料可以回收利用。请按照环保要求处理包装。
 电气和电子设备含有宝贵的可再利用的材料以及诸如电池、电池包或油等若使用不当或处理错误会对人体健康和环境造成潜在性危险的组成部分。为了设备按规定运行,需要这些组件。用符号标记的设备不得与生活垃圾一同处理。
电气和电子设备含有宝贵的可再利用的材料以及诸如电池、电池包或油等若使用不当或处理错误会对人体健康和环境造成潜在性危险的组成部分。为了设备按规定运行,需要这些组件。用符号标记的设备不得与生活垃圾一同处理。
最新的内部材料信息请您在如下链接中查找:www.kaercher.com/REACH
只允许使用原厂附件和备件,它们可以确保设备安全无故障地运行。
关于附件和备件的信息参见 www.kaercher.com。
在每个国家,适用由我们的主管销售公司发布的质量保证条款。在质量保证期内,如果您的产品发生了任何故障,我们都将为您提供免费维修,但是这种故障应当是由于机身材料或制造上的缺陷造成的。如属质量保证情况,请凭发票联系贵方经销商或就近联系获得授权的客户服务点。
欲了解更多信息,请访问: www.kaercher.com/dealersearch
更多的质量保证信息(如果有)可以在您当地 Kärcher 网站服务区的“下载”下找到。
无意中启动设备,接触带电部件
受伤危险,触电
在执行任何工作之前,请将设备与对接站断开,或拔出电源插头。安装不当可能会造成财产损失
请务必由合格的专业人员进行安装。请务必遵守清洁机器人的操作说明书和安全提示。
所需工具:
TORX 15 螺丝刀
关闭清洁机器人,具体操作请参见清洁机器人的操作说明书。
拆卸清洁剂罐
取下盖板。
取出清洁剂罐。
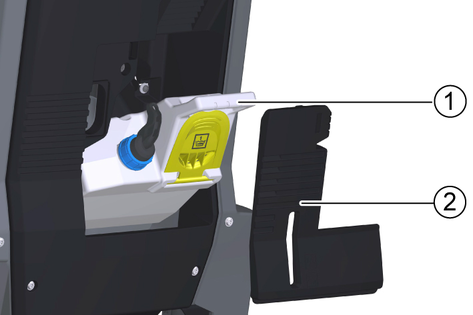
使用 TORX 15 螺丝刀拆下 USB 端口盖。
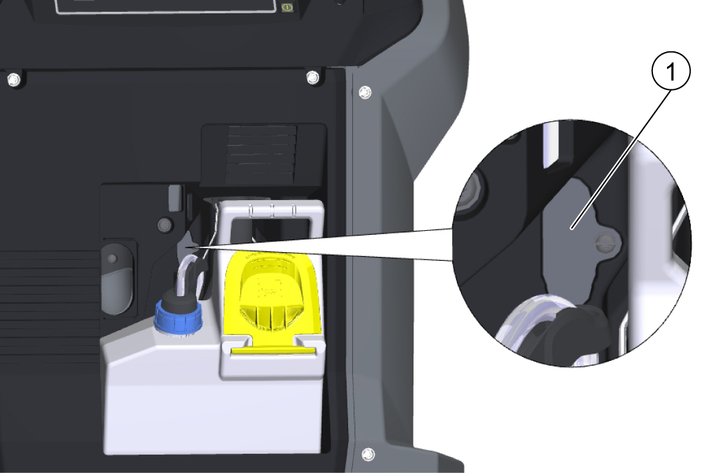
将 U 盘插入 USB 端口。
安装清洁剂罐。
将清洁剂罐放入到位。在此过程中,请注意不要损坏发射器。
盖上盖子。
接通清洁机器人,具体操作请参见清洁机器人的操作说明书。
关闭清洁机器人,具体操作请参见清洁机器人的操作说明书。
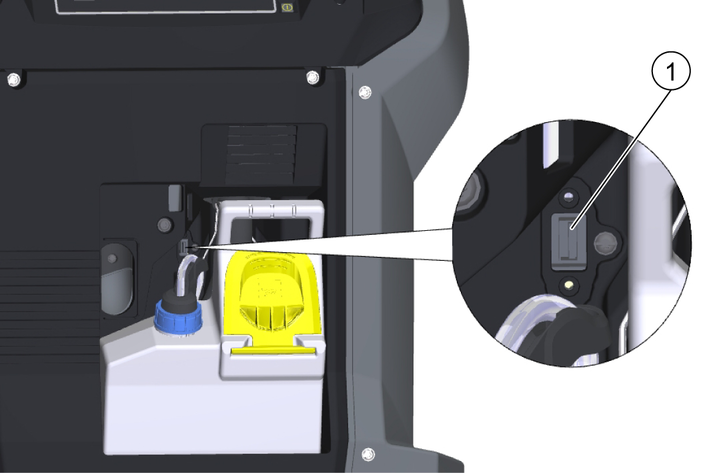
安装 U 盘:
打开设备舱的门。
拧下盖子上的螺丝并取下盖子。
将 U 盘插入 USB 端口。
安装盖子并拧紧螺丝。
关闭设备舱的门。
接通清洁机器人,具体操作请参见清洁机器人的操作说明书。
前提条件:
每个需要设置的卷帘门都安装有一个接收器。
清洁机器人已完成改装,并且位于接收器的信号传输范围内。
使用启动键打开控制面板。
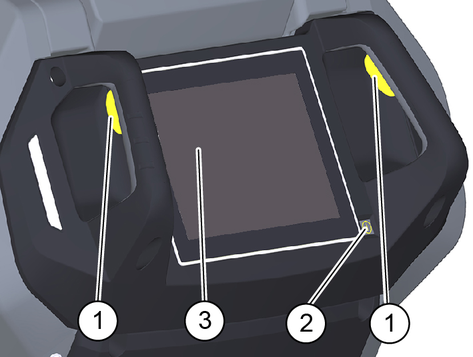
按下触摸屏上的设置图标。
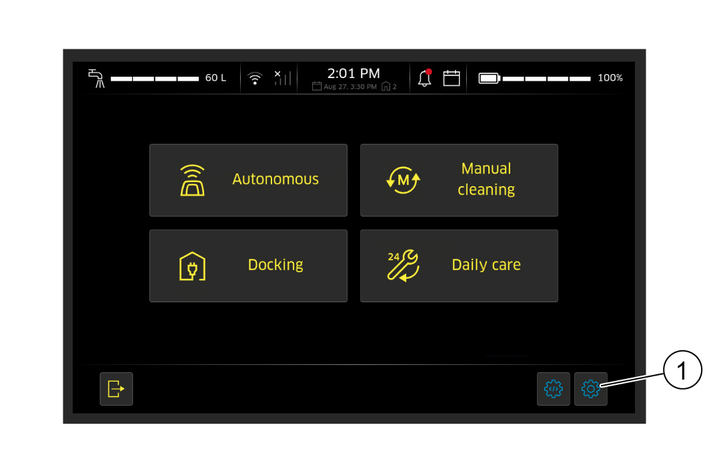
选择 Infrastructure(基础设施)菜单。

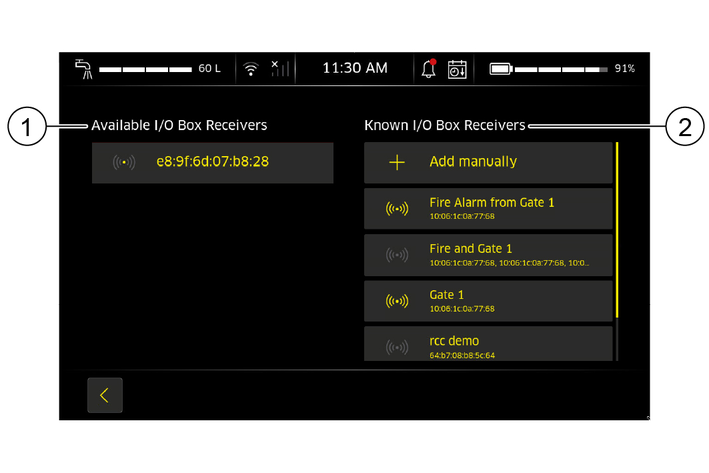
选择 I/O Box Setup(I/O 盒设置)。

显示所有可选择的接收器。
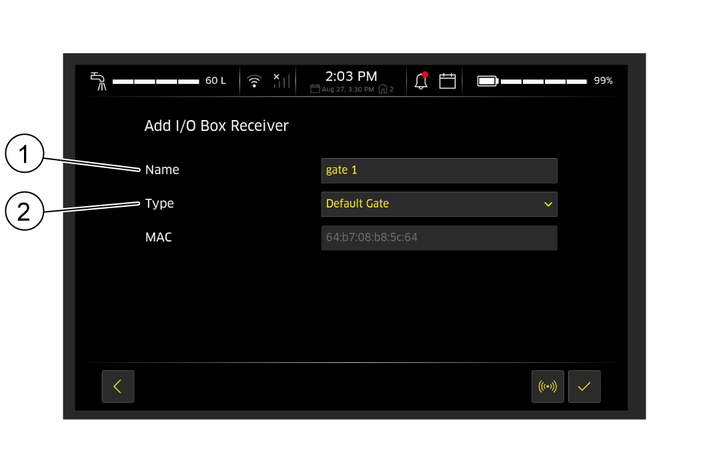
从列表中选择接收器(卷帘门)。

为接收器(卷帘门)指定名称和类型。
将接收器的类型设置为“Default-Gate”(默认门)。
如果您为每个门创建了一个接收器,请将该门的类型设置为“Default-Gat”(默认门)。当清洁机器人到达默认门 (Default-Gate) 区域时,它会触发相应接收器的门控系统。
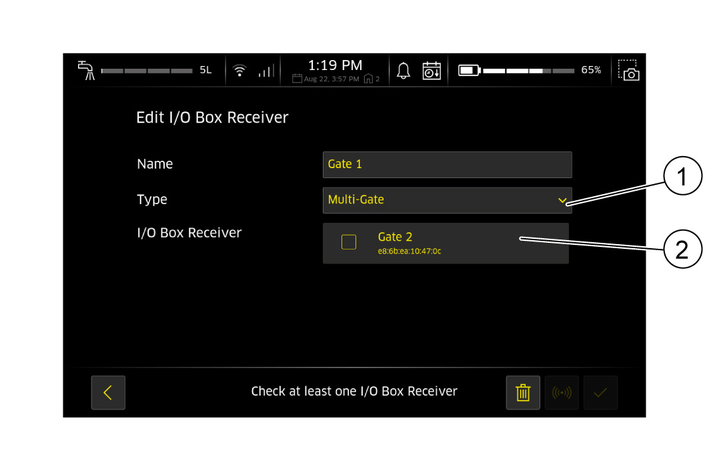
可选:将接收器的类型设置为“Multi-Gate”(多门)。
Multi-Gate(多门)提供了在一个区域内打开多个门 (Gates) 的功能。这意味着,当清洁机器人到达 Multi-Gate(多门)区域时,它会触发多个接收器的门控系统。当多个卷帘门彼此相邻放置时,例 如在一个角落里,这可能会非常有利。
使用上键和下键来测试发射器的功能。
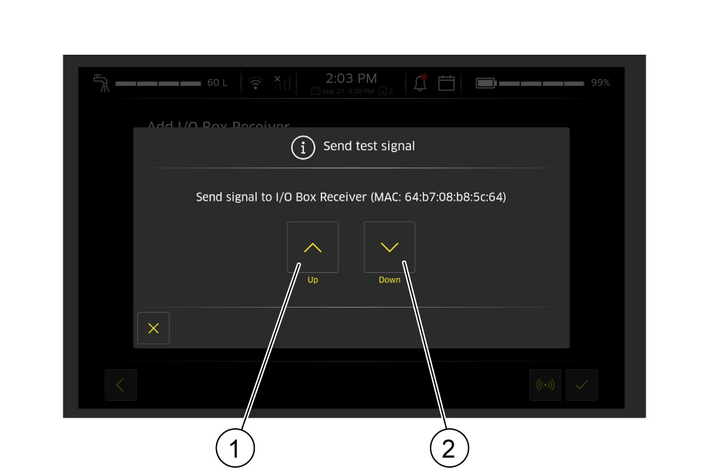
通过点击勾选符号来确认选择。
对于其他接收器(卷帘门),请重复步骤 5 至 8。
切换到地图编辑。请参阅 KIRA B 50 清洁机器人的操作说明。
按下触摸屏上的设置图标。
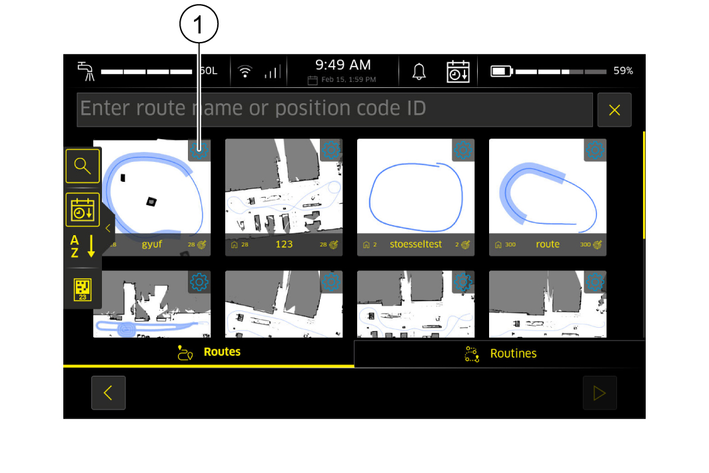
设置区域。
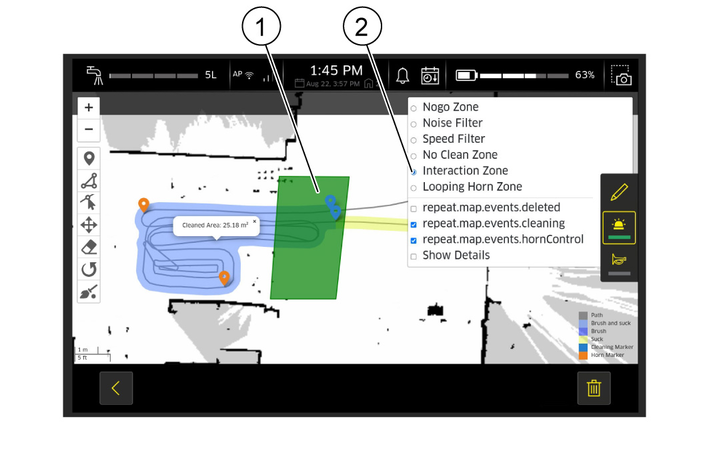
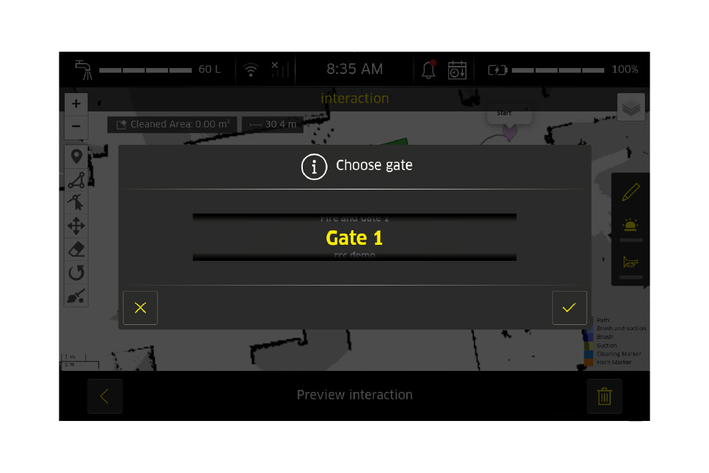
打开区域选择。绿色区域定义了门控系统的响应区域。
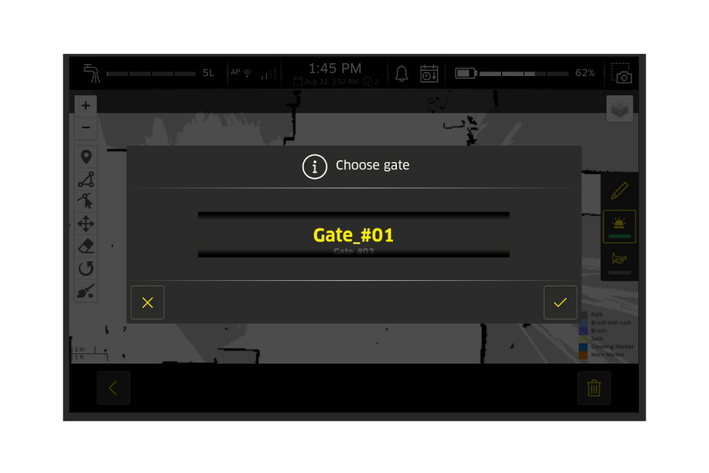
选择门。区域没有标准分配,也就是说 ,如果未选择门,区域内的门控系统将不会响应。
选择“交互区域”。
清洁机器人在进入绿色区域时会打开指定的门。
前提条件
对于每个需要设置的卷帘门,需安装一个带电压表的接收模块。
清洁机器人已完成改装,并且位于接收器的信号传输范围内。
清洁机器人在插入发射器(U 盘)后启动。
使用启动键打开控制面板。
按下触摸屏上的设置图标。
选择
选择
显示所有可选择的接收器。
从列表中选择接收器(卷帘门)。
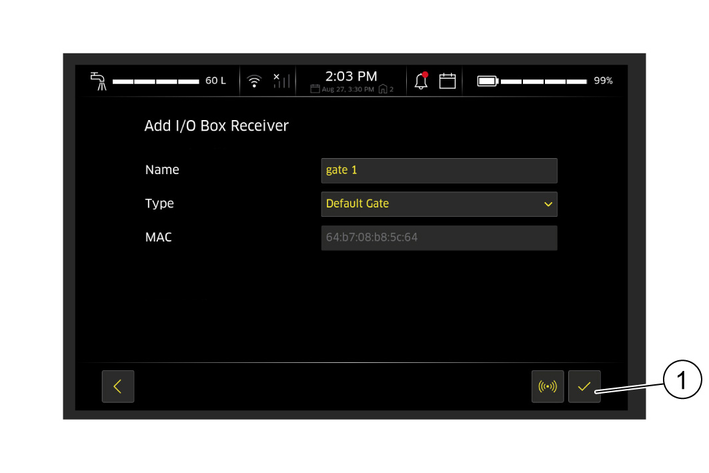
为接收器(卷帘门)指定名称和类型。
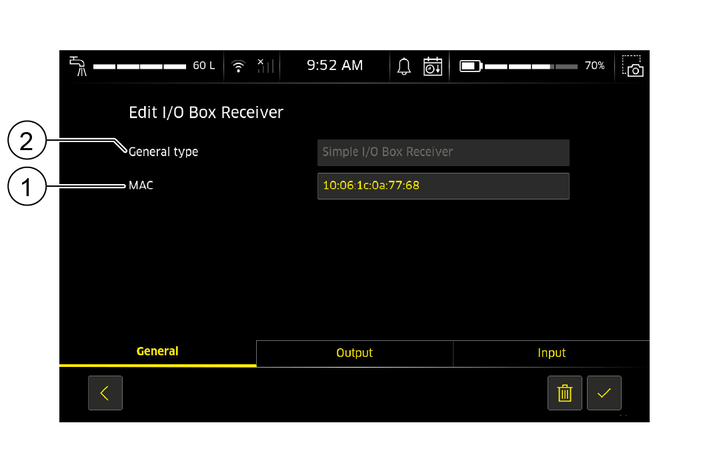
为接收器分配类型。
为接收器分配一个“MAC 地址”。
可以设置发送至接收器的输出信号和 /或设置来自接收器的输入信号。
输出信号:清洁机器人向接收器发送信号,以打开相应交互区域内的门。
输入信号:当发生火灾报警时,清洁机器人会接收到来自接收器的信号。在相应的交互区域中,重复操作将被自动中断。
设置发送至接收器的输出信号。
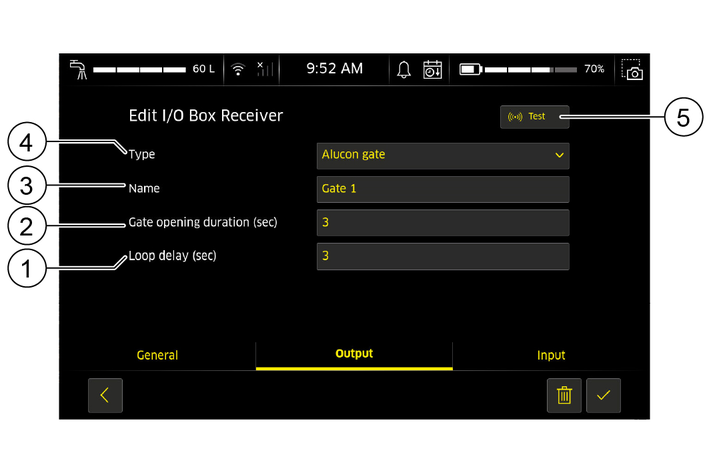
选择类型。
指定名称。
输入门保持开启状态的持续时间(单位:秒)。由于部分门在第二次收到开门指令时会停止开启动作,因此可在此设置清洁机器人在发出第一次指令后需等待的时间。
输入循环延迟数值(单位:秒)。由于 Alucon 门会在一定时间后自动关闭,因此可在此设置开门指令的重新发送间隔时间。
如需测试连接,请按下测试按钮。
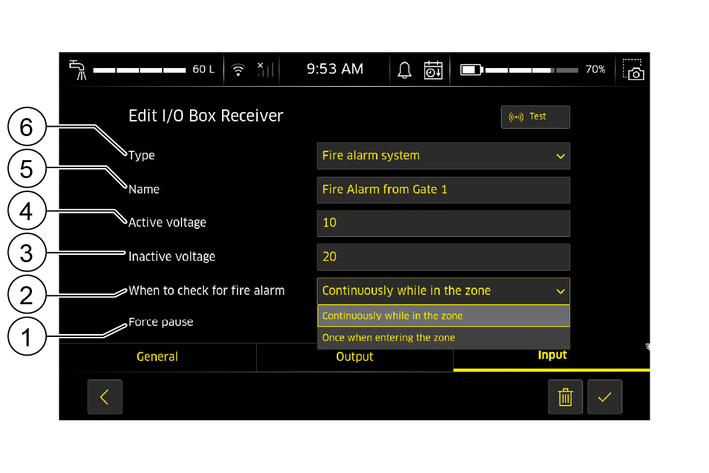
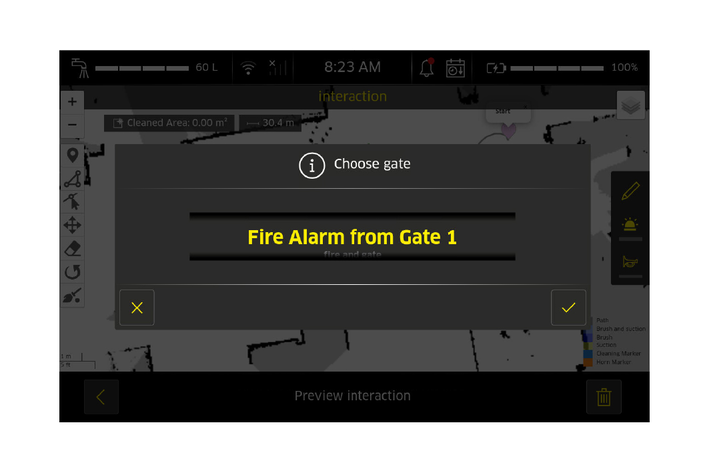
设置来自接收器的输入信号。
部分火灾报警系统会在超过特定阈值时触发,而另一些则会在电压低于设定值时触发。两种触发模式均可选择。在所示的示例中,发生火灾报警时电压会降至 10 V。
选择
指定
在
在
选择清洁机器人何时检查火警。有两 个选项可供选择:
持续:只要清洁机器人位于交互区域内,就会暂停重复操作。在门的每一侧,当清洁机器人在重复操作过程中接近时,都应设置一个区域。该区域不应位于门的下方,否则当此处触发火灾报警时,机器人就会直接在门下方暂停。
进入区域时检测一次:清洁机器人仅在进入交互区域时检测一次火灾报警。若火灾报警触发,机器人将在区域边界处暂停重复操作。若清洁机器人处于区域中部时火灾报警触发,则将继续执行任务。此选项可与门上方的交互区域一起使用。
启用 /禁用强制暂停。
选项已启用: 清洁机器人将忽略现场人员发出的重复操作请求。循环任务不可继续执行,只能中止。
选项已禁用:由火灾报警信号触发的暂停状态可被解除。
选项:设置组合式接收器。
若需创建同时作为出入口触发器或多门触发器的交互区域,则必须额外配置组合式接收器,因为重叠区域将无法正常工作。
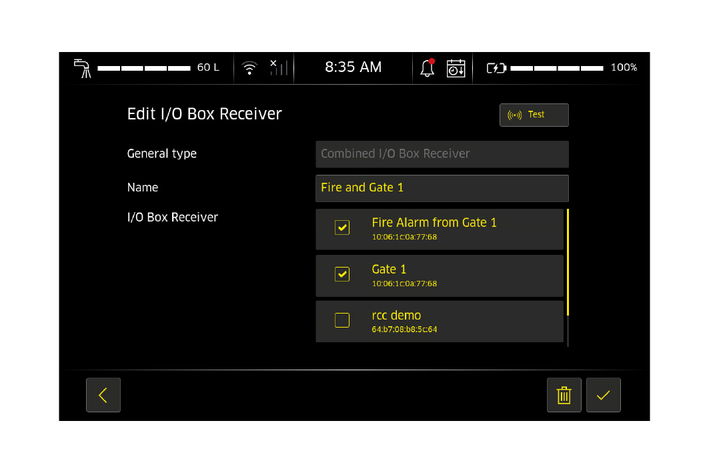
组合式接收器示例
在所示的示例中,组合式接收器接收发送至“门 1”的指令以及“门 1 火灾报警”输入信号。
通过启用进入区域后检测一次选项可避免清洁机器人在发生火灾报警时滞留于门下方。
即使清洁机器人在进入区域时被暂停,仍会执行开门动作。若不需要此功能,则必须为门控系统和火灾报警设置单独的区域。
切换到地图编辑。请参阅 KIRA B 50 清洁机器人的操作说明。
按下触摸屏上的设置图标。
设置交互区域。

打开区域选择。绿色区域定义了门控系统的响应区域。
选择门。区域没有标准分配,也就是说 ,如果未选择门,区域内的门控系统将不会响应。
选择“交互区域”。
清洁机器人在进入绿色区域时会打开指定的门。
设置单独的火灾报警区域。
交互区域不得重叠。
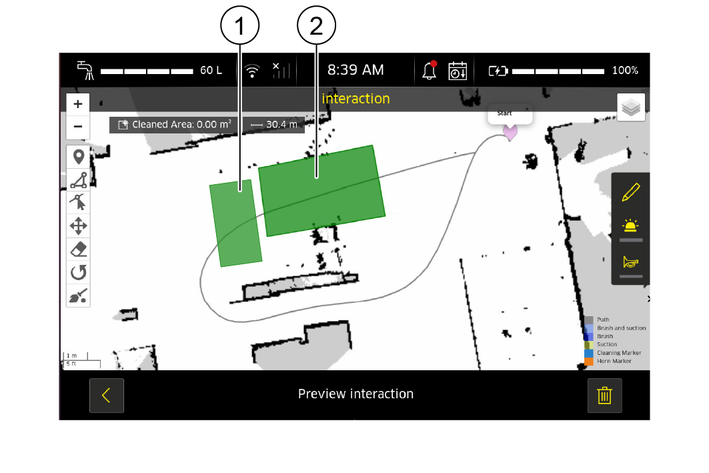
打开区域选择。绿色区域定义了门控系统响应或火灾报警触发的区域。
选择火灾报警对应的门。
对于火灾报警区域的
设置带火灾报警的组合式交互区域。
即使清洁机器人在进入区域时被暂停,仍会执行开门动作。若不需要此功能,请按照步骤 13 所述,为门控系统和火灾报警设置单独的区域。

打开区域选择。绿色区域定义了门控系统响应以及火灾报警触发的区域。
请将该区域设置得足够大,确保清洁机器人抵达门时门已完全开启,从而保证机器人顺畅通行。
选择火灾报警对应的门。
对于火灾报警区域的
0-0-0-A4-GS-AW19869